PSS®E Static
Introduction
The PSS®E Static Node performs static study simulations which are powered by PSS®E, a 3rd party power systems software. It leverages the following PSS®E modules:
- Power Flow
- Short Circuit
This Node is typically used for the following:
- Completing static studies (e.g. investigating thermal loading of an asset pre and post a variety of contingencies).
- Setting up cases for dynamic studies (e.g. creating a case for a specific active power set point as part of a test).
Check our system requirements page for information on which PSS®E versions are currently supported.
User inputs
Select model
Model
Defines the input directory and file name of the PSS®E Case file, including the .sav file extension.
Example:
sunny-solar-farm\SMIB.sav
File paths are relative to the Engine's 'inputs' directory, as defined by the Engine configuration parameter dirs.inputs. For example, if dirs.inputs was set as C:\Users\johnsmith\gridmo\Inputs\:
| Absolute file path | Relative file path (required by gridmo) |
|---|---|
| C:\Users\johnsmith\gridmo\Inputs\sunny-solar-farm\SMIB.sav | sunny-solar-farm\SMIB.sav |
Define simulation
This allows you to merge your Model into a network model. If enabled, this merge process is completed before the Commands are applied.
Network model
Defines the input directory and file name of the PSS®E Case file, including the .sav file extension.
Example:
network-model/case.sav
Model: Bus number
Defines the bus number in the Model at which the network model is merged.
Example:
100
Network model: Bus number
Defines the bus number in the Network model at which the model is merged.
Example:
30000
Commands
Defines the Commands which configure the static simulation.
Supported Commands:
- ADD: Adds a new type of network element (e.g. generator, load).
- SET: Sets the status or value of a network element (e.g. bus, line, generator).
- SCALE_TX: Scales a single transformer's base power, used to simulate a variable number of aggregated transformers.
- CONTROL: Controls a network element.
- SOLVE: Solves the static case, considering all previous
SETandCONTROLCommands. - OUTPUT: Outputs a value as an Internode Variable.
Advanced
PSS®E version
Defines the PSS®E version used for the Node. Defaults to Engine configuration.
gridmo Engine v1.5.0 onwards supports partial versions. See here for details.
PSS®E Python API
Defines the PSS®E API version used for the Node. Defaults to Engine configuration.
Advanced Parameters
Advanced Parameters allow users to configure test details which are not commonly used. Advanced Parameters are often specific to each Node type.
Each line represents a new Advanced Parameter and is entered as a=b format, where a is the name of the Parameter and b is the corresponding value. All Advanced Parameters are set to their default values if they are not included in the Advanced Parameters field.
Example: Set Advanced Parameter, sample.parameter to a value of 5.
sample.parameter=5
API Reference
This section details the Commands and Advanced Parameters specific to the Node.
Lines are defined using the following syntax: from->to#id.
When completing SMIB studies, we recommend the line points in the direction towards the bulk electrical grid (the to bus being closer to your Thévenin source) for easy interpretation of results.
ADD Command
Add generator
ADD, TYPE=GEN, BUS=, [GEN_ID], PMAX=, PMIN=, QMAX=, QMIN=, [MBASE=100, RSOURCE=0, XSOURCE=1.0]
Adds a generator network element at a specified bus.
Arguments:
- ADD
- TYPE (
str): Network element type. Set asGEN. - BUS (
int): Bus number. This bus number must exist within the case file. We will add the generator at this bus and change the bus type code to "2 - Generator Bus". - GEN_ID (
int)[Optional]: The ID of the newly created generator. If not provided, added generators have a PSS®E ID ofxwherexis an integer (e.g. 100#1, 100#99). - PMAX 🔢 (
float): Maximum active power capability of the generator [MW]. - PMIN 🔢 (
float): Minimum active power capability of the generator [MW]. - QMAX 🔢 (
float): Maximum reactive power capability of the generator [MVAr]. - QMIN 🔢 (
float): Minimum reactive power capability of the generator [MVAr]. - MBASE 🔢 (
float)[Optional]: Base MVA of the generator [MVA]. Default value is 100. - RSOURCE 🔢 (
float)[Optional]: Generator resistance [p.u. on MBASE]. Default value is 0. - XSOURCE 🔢 (
float)[Optional]: Generator reactance [p.u. on MBASE]. Default value is 1.0.
By default, the generator dispatch conditions are set as the following:
- Generator terminal active power = 0 MW (i.e. Machine Data -> Pgen (MW) = 0).
- Control mode is direct voltage control (i.e. Wind data -> Control Mode = "Conventional Machine").
- Voltage control mode regulated bus is set as the bus number from the Argument
BUS(i.e. Plant Data -> Sched Voltage =BUSnumber). - Voltage reference is set as the bus voltage at
BUSsuch that Qgen will be 0 MVAr (i.e. Plant Data -> Sched Voltage =BUSvoltage).
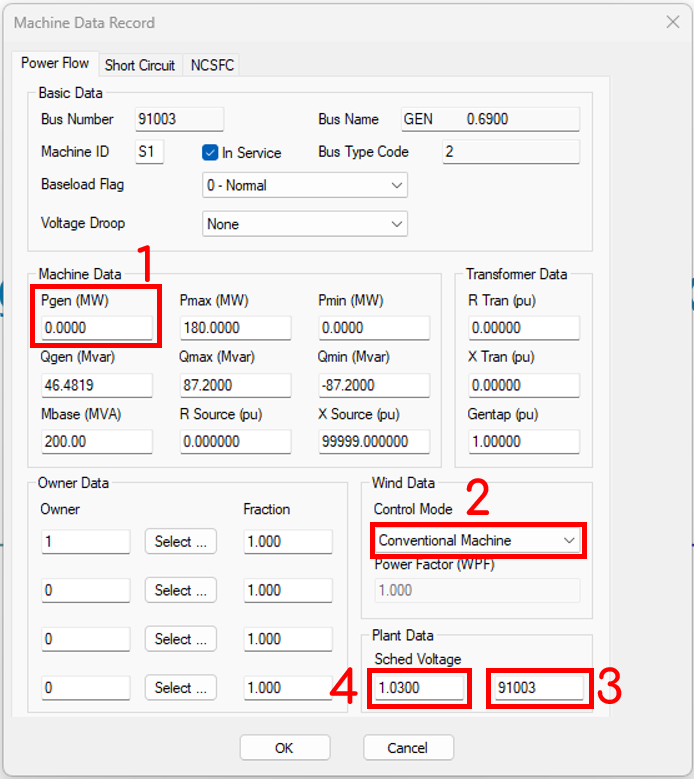
To change the generator dispatch conditions (e.g. Pgen, Qgen, Vref), please use the respective CONTROL Commands.
Example: Add a generator at bus 1000. Bus 1000 is already a generator type bus and therefore we can add the generator directly to this bus. The generator should have the following properties: Pmax = 100MW, Pmin = 20MW, Qmax = 30 MVAr, Qmin = -30MVAr.
ADD, TYPE=GEN, BUS=1000, PMAX=100, PMIN=20, QMAX=30, QMIN=-30
Add load
ADD, TYPE=LOAD, BUS=, P=, Q=, YP=, YQ=
Adds a load network element at a specified bus.
Arguments:
- ADD
- TYPE (
str): Network element type. Set asLOAD. - BUS (
int): Bus number. This bus number must exist within the case file. - P 🔢 (
float): Constant active power [MW]. - Q 🔢 (
float): Constant reactive power [MVAr]. - YP 🔢 (
float): Constant admittance active power [MW]. - YQ 🔢 (
float): Constant admittance reactive power [MVAr].
At least one of P=, Q=, YP= or YQ= must be specified. Any unspecified values default to 0.
Example: Add a 25 MW, 5 MVAr load at bus 400.
ADD, TYPE=LOAD, BUS=400, P=25, Q=5
Added loads have a PSS®E ID of Gx where x is an integer. For example:
- The Command
ADD, BUS=100, P=10creates a load with identifier100#G1. - If a second
ADD, BUS=100, P=10Command was used, a new load with identifier100#G2would be created.
SET Command
Set bus
SET, BUS=, [BUS=], STATUS=
Sets the status of a bus.
Arguments:
- SET
- BUS (
int): Bus number. - BUS (
int)[Optional]: Additional bus numbers. - STATUS (
str): Bus status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.STATUS=1: Explicitly set bus type code as 1 (i.e. Non-Gen Bus).STATUS=2: Explicitly set bus type code as 2 (i.e. Generator Bus).STATUS=3: Explicitly set bus type code as 3 (i.e. Swing bus).STATUS=4: Explicitly set bus type code as 4 (i.e. Disconnected).
We recommend using STATUS=IN and STATUS=OUT Arguments. Explicitly setting the bus type code is not recommended since it doesn't consider what assets are connected to the selected bus.
Example: Set bus 100 out of service.
SET, BUS=100, STATUS=OUT
Set line
SET, LINE=, [LINE=, STATUS=, SCR=, XR=]
Sets the status and impedance of a line.
Arguments:
- SET
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - LINE (
pas)[Optional]: Additional line definitions. Note:SCR=andXR=apply to a single line only (do not use multipleLINE=arguments withSCR/XR). - STATUS (
str)[Optional]: Line status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- SCR (
float)[Optional] Set the Short Circuit Ratio and X/R Ratio:SCR=X(whereXis a number): Sets the impedance of the given line to the equivalent Thévenin impedance based on the Project's rated active power [MW], the line voltage and the specified SCR and X/R ratio.SCR=INF: Sets the impedance of the given line to the minimum cross-software stable impedance.XR=Argument is ignored.
- XR 🔢 (
float)[Optional]: Sets the impedance of the given line to the equivalent Thévenin impedance based on the Project's rated active power [MW], the line voltage and the specified SCR and X/R ratio. - R 🔢 (
float)[Optional]: Sets the resistance of the given line to the specified value in ohms. - X 🔢 (
float)[Optional]: Sets the reactance of the given line to the specified value in ohms. - B 🔢 (
float)[Optional]: Sets the susceptance of the given line to the specified value in microfarads (µF).
SCR and XR Arguments must be used together. These Arguments are typically only used in SMIB studies and are used to calculate the Thévenin equivalent source impedance of the infinite generator.
R, X, and B Arguments can be used independently or together to set specific line parameters in ohms and microfarads respectively. Not all three need to be specified.
Example: Set the impedance of the line from bus 800 to bus 900 which has an ID of 1. The line impedance should represent the system Thévenin equivalent impedance for an SCR of 3 and X/R ratio of 2.
SET, LINE=800->900#1, STATUS=IN, SCR=3, XR=2
Example: Set the impedance of the line from bus 1000 to bus 999 with ID 1 to near-zero impedance (infinite system strength), noting that XR= Argument is ignored.
SET, LINE=1000->999#1, STATUS=IN, SCR=INF, XR=1
Example: Set specific resistance, reactance and susceptance values for a line to model a collector group outage within a solar farm. Sets the line impedance to 0.2 + j1.3 ohms, with 4.7 uF of shunt capacitance.
SET, LINE=300->400#1, STATUS=IN, R=0.2, X=1.3, B=4.7
Set transformer
SET, TX=, [STATUS=, TAPRATIO=, WINDING=]
Sets the status of a transformer.
Arguments:
- SET
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - STATUS (
str)[Optional]: Transformer status. If not specified, transformer status is not changed from the current state. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- TAPRATIO 🔢 (
float)[Optional]: Sets the tap ratio of the specified winding number. The control mode of the transformer will be set to "None" to ensure the set tap ratio is maintained irrespective of whetherSOLVE, LOCKTAPS=NOis used. - WINDING (
int)[Optional]: The winding number used when setting the tap ratio. Options:WINDING=1: Winding number 1.WINDING=2: Winding number 2.WINDING=3: Winding number 3 (only applicable for three-winding transformers).
The Engine will check that the specified tap ratio is valid given the transformer tap configuration.
If the transformer does not have a tap changer enabled, or the transformer's configuration does not allow the specified tap ratio, the Engine will raise an error.
Example: Set the three-winding transformer in-service which is located between bus 100, bus 200, and bus 300 and which has an ID of 1.
SET, TX=100->200->300#1, STATUS=IN
Example: Set the tap position of winding one of the two-winding transformer to 0.975 which is located between bus 100 and bus 200 and which has an ID of 1.
SET, TX=100->200#1, TAPRATIO=0.975, WINDING=1
Setting the tap ratio assumes that the transformer winding I/O code is in p.u., not kV.
Set generator
SET, GEN=, [GEN=], STATUS=, [PMAX=, PMIN=, QMAX=, QMIN=, MBASE=, VALSCALE=, VAL_FUNCTION=]
Sets the status or active/reactive power limits of a generator.
Arguments:
- SET
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. - STATUS (
str): Generator status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- PMAX 🔢 (
float)[Optional]: Maximum active power capability of the generator [MW]. - PMIN 🔢 (
float)[Optional]: Minimum active power capability of the generator [MW]. - QMAX 🔢 (
float)[Optional]: Maximum reactive power capability of the generator [MVAr]. - QMIN 🔢 (
float)[Optional]: Minimum reactive power capability of the generator [MVAr]. - MBASE 🔢 (
float)[Optional]: Base MVA of the generator [MVA]. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toQMAX,QMIN,PMAXandPMIN(i.e.PMAXxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toQMAX,QMIN,PMAXandPMIN. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions.
Setting PMIN= or PMAX= will clamp the active power (Pgen) of the generator to within the specified bounds.
Example: Set the generator out of service which is located at bus 100 which has an ID of 1.
SET, GEN=100#1, STATUS=OUT
Example: Set the aggregated generator at bus 150 with id 1 active power min and maximum range to -1.5 MW (for example, to represent a synchronous machine operating in synchronous condenser mode).
SET, GEN=150#1, PMAX=-1.5, PMIN=-1.5
Set load
SET, LOAD=, STATUS=
Sets the status of a load.
Arguments:
- SET
- LOAD (
pas): Load definition. Loads are defined using the following syntax:bus#id. - STATUS (
str): Load status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
Example: Set the load out of service which is located at bus 100 and which has an ID of 2.
SET, LOAD=100#2, STATUS=OUT
Set fixed or switched shunt
SET, SHUNT=, STATUS=
Sets the status of a switched or fixed shunt.
Arguments:
- SET
- SHUNT or FSHUNT (
pas): Shunt definition, automatically selects between switched or fixed shunt based on PSS®E version and shunts present in the model. Use the following syntax:bus#id. See below for details. - STATUS (
str): Shunt status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
PSS®E supports two different types of shunts, a fixed type and a switched type.
- For PSS®E versions older than v35, each bus could only support one switched shunt.
- For PSS®E versions v35 onwards, each bus can support multiple switched shunts, each with different IDs.
gridmo will attempt to automatically determine which shunt is being requested as follows:
- If PSS®E is older than v35 (e.g. v33, v34):
- If there is a switched shunt on the specified bus, it will be set by this command.
- Otherwise, if there is a fixed shunt on the specified bus with the specified ID, it will be set by this command
- If PSS®E is v35 or newer:
- If there is a switched shunt on the specified bus with the specified ID, it will be set by this command
- Otherwise, if there is a fixed shunt on the specified bus with the specified ID, it will be set by this command
If there is both a switched and a fixed shunt on the same bus with the same ID, you can force gridmo to only consider fixed shunts by replacing SHUNT= with FSHUNT= in your command (though we don't recommend mixing fixed and switched shunts on the same bus in general.)
Example: Bus 200 has a single switched shunt present, set that shunt out of service.
SET, SHUNT=200#1, STATUS=OUT
Example: Bus 200 has two fixed shunts present (with IDs 1 and 2) and no switched shunt present, set the second fixed shunt out of service.
SET, SHUNT=200#2, STATUS=OUT
Example: Bus 200 has both a switched and fixed shunt (both with ID 1), set the fixed shunt out of service, leaving the switched shunt in service.
// Use FSHUNT= here to force gridmo to only modify fixed shunts
SET, FSHUNT=200#1, STATUS=OUT
SCALE_TX Command
SCALE_TX, [TX=], CHANGE=
Applies an absolute or relative scaling factor to one or more transformers. Typically used to simulate a variable number of aggregated transformers.
Arguments:
- SCALE_TX
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - CHANGE: How to scale the specified transformers. Options:
- Absolute value 🔢 (
float): Reduce/increase the specified transformers equally by a fixed factor, such asCHANGE = -2meaning reduce each transformer's base value by2MVA. - Relative value (
float%): Apply a percentage scale to each transformer specified, such asCHANGE = -20%meaning reduce each transformer's base value by20%.
- Absolute value 🔢 (
For three winding transformers, the CHANGE= specified is applied to each winding.
Example: The transformer between buses 1225 and 1226 with ID 1 represents an aggregation of 25 equivalent transformers as part of a SMIB model. Scale the transformer so it represents only a single aggregated transformer (for benchmarking purposes with site commissioning data).
SCALE_TX, TX=1225->1226#1, CHANGE=-96% // 1/25 = 0.04, so scale down by 96% to turn 25 transformers into 1
CONTROL Command
Control Commands are additional solution requirements added to the convergence algorithm which is initiated by the SOLVE Command. These Commands typically cover functionality which is not natively supported by PSS®E. A SOLVE Command is required for preceding CONTROL Commands to be considered.
The gridmo Engine can control shunt Flexible AC Transmission System (FACTS) devices in PSS®E as generators. To modify a FACTS device using gridmo, use the GEN=bus#name syntax as shown below.

Examples:
CONTROL, GEN=1001#STATCOM1, ... // Rest of command see below
CONTROL_P, GEN=[DEFINITION=1001#STATCOM1, ...], .... // Rest of command see below
CONTROL_P Active power from generator(s)
CONTROL_P, GEN=[DEFINITION=, PRIORITY=1, RATIO=], GEN=[...], [ATLINE=, METERBUS=, VALSCALE=, VAL_FUNCTION=], VAL=
Uses a software-agnostic power plant controller to achieve an active power target. The target can be specified at the generator terminals, or at a remote line. Supports dispatch order and active power sharing (and a mixture of both).
Arguments
- CONTROL_P
- GEN (
object): Generator definition with parameters on a per-generator level within square brackets[...]:- DEFINITION (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - PRIORITY 🔢 (
int)[Optional]:- Dispatch priority (order) for this generator. Only positive integers supported. Defaults to 1.
- Generators with the highest priority will be dispatched first as far as their operational limits allow, then generators in later orders are dispatched next.
- RATIO 🔢 (
float)[Optional]:- Sharing ratio for this generator. If
RATIO=0this generator will not contribute to achieving the target. Only values greater than or equal to zero supported. Defaults to generator base (in MVA). - Generators in the same
PRIORITYwill share the active power target based on theirRATIOvalues. - The engine will normalize all share values, so it can be ratios or percentages or pu etc.
- Sharing ratio for this generator. If
- DEFINITION (
- ATLINE (
pas)[Optional] Location of the target active power.- If not specified, the active power target is regulated at the generator terminals.
- If
ATLINE=from->to#id(pas): Active power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVAL(i.e.VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VAL 🔢 (
float): Active power setpoint [MW].
Examples
Solar farm with single aggregated generator
- Control the aggregated generator at bus 100 with ID
1to achieve a target active power of95MW at the point of connection, between bus 400 and bus 500 with branch ID1.
CONTROL_P, GEN=[DEFINITION=100#1], ATLINE=400->500#1, VAL=95
Solar farm with multiple aggregated generators
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target active power of95MW at the point of connection, between bus 400 and bus 500 with branch ID1. - The active power contribution from each generator should be shared equally.
CONTROL_P, GEN=[DEFINITION=100#1, RATIO=0.5], GEN=[DEFINITION=200#2, RATIO=0.5], ATLINE=400->500#1, VAL=95
Solar farm with multiple aggregated generators and priority dispatch
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target active power of95MW at the point of connection, between bus 400 and bus 500 with branch ID1. - The active power contribution from each generator should be shared equally.
- Prioritize supplying active power from the aggregated solar farm generator at bus 100 before supplying any active power from the aggregated BESS generator at bus 200.
CONTROL_P, GEN=[DEFINITION=100#1, PRIORITY=1], GEN=[DEFINITION=200#2, PRIORITY=2], ATLINE=400->500#1, VAL=95
Solar farm with multiple aggregated generators and unequal power sharing
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target active power of95MW at the point of connection, between bus 400 and bus 500 with branch ID1. - The active power contribution from each generator should be 70% from the aggregated solar farm generator at bus 100 and 30% from the aggregated solar farm generator at bus 200.
CONTROL_P, GEN=[DEFINITION=100#1, RATIO=70], GEN=[DEFINITION=200#2, RATIO=30], ATLINE=400->500#1, VAL=95
Large wind farm with multiple aggregated generators, power sharing based on relative size
- Control the four aggregated generators at buses 100, 101, 200 and 201 - all with ID
1. - Achieve an active power target of 760 MW at the point of connection, between bus 400 and bus 500 with branch ID
1. - The active power contribution from each generator should be shared equally based on the relative size of each generator.
CONTROL_P, GEN=[DEFINITION=100#1], GEN=[DEFINITION=101#1], GEN=[DEFINITION=200#1], GEN=[DEFINITION=201#1], ATLINE=400->500#1, VAL=760
CONTROL_VDROOP Voltage droop control from generator(s)
CONTROL_VDROOP, GEN=[DEFINITION=, PRIORITY=1, RATIO=], GEN=[...], QBASE=, DROOP%=, DEADBAND=, QMIN=, QMAX=, ATBUS=, [ATLINE=, METERBUS=, VALSCALE=, VAL_FUNCTION=], VAL=
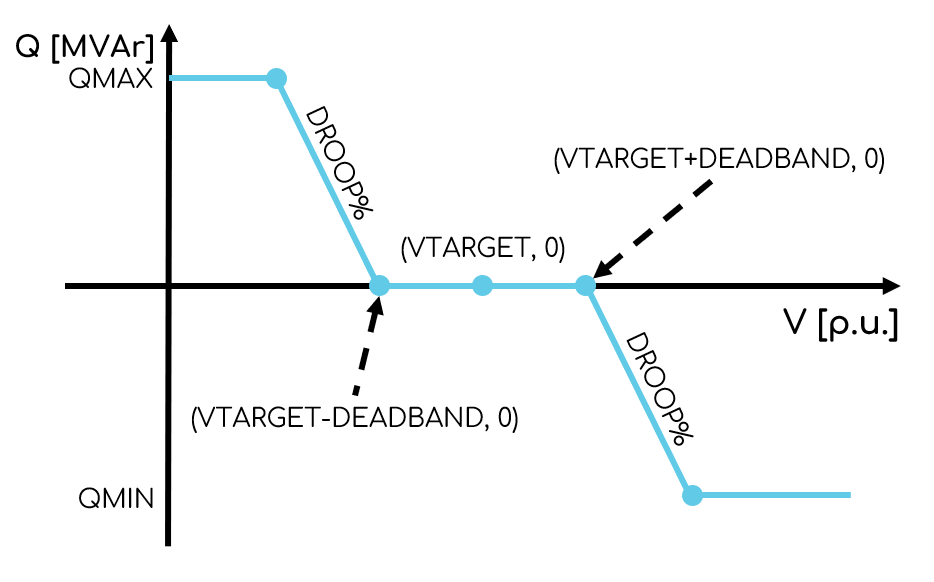
Uses a software-agnostic power plant controller to achieve voltage droop control. Controls one or more generators using voltage droop control. If the measured voltage is larger/smaller than the voltage target + deadband, the specified generators will be controlled to absorb/supply reactive power equal to the droop percentage of QBASE for every 1% the measured voltage is above the voltage target + deadband.
Arguments
- CONTROL_VDROOP
- GEN (
object): Generator definition with parameters on a per-generator level within square brackets[...]:- DEFINITION (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - PRIORITY 🔢 (
int)[Optional]:- Dispatch priority (order) for this generator. Only positive integers supported. Defaults to 1.
- Generators with the highest priority will be dispatched first as far as their operational limits allow, then generators in later orders are dispatched next.
- RATIO 🔢 (
float)[Optional]:- Sharing ratio for this generator. If
RATIO=0this generator will not contribute to achieving the target. Only values greater than or equal to zero supported. Defaults to generator base (in MVA). - Generators in the same
PRIORITYwill share the reactive power target based on theirRATIOvalues. - The engine will normalize all share values, so it can be ratios or percentages or pu etc.
- Sharing ratio for this generator. If
- DEFINITION (
- QBASE 🔢 (
float): Base reactive power [MVAr]. - DROOP% (
float): Droop percentage [%]. - DEADBAND 🔢 (
float): Voltage deadband [p.u.]. - QMIN 🔢 (
float)[Optional]: Minimum reactive power limit at theATLINE=line [MVAr]. Default value is negative infinity. - QMAX 🔢 (
float)[Optional]: Maximum reactive power limit at theATLINE=line [MVAr]. Default value is positive infinity. - ATBUS (
int): Bus number which has the target voltage. - ATLINE (
pas)[Optional]: Line which is used for measuring the reactive power. Lines are defined using the following syntax:from->to#id. - METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVAL(i.e.VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VAL 🔢 (
float): Target voltage set point [p.u.].
Examples
Single generator voltage droop control
- Control a generator at bus 100 with ID
1using voltage droop control with a target voltage of1.01p.u. at bus 600, a QBASE of50MVAr, a droop percentage of4%and a voltage deadband of0.01p.u. The reactive power is measured at the line between bus 600 and bus 700 with branch ID1.
CONTROL_VDROOP, GEN=[DEFINITION=100#1], QBASE=50, DROOP%=4, DEADBAND=0.01, ATBUS=600, ATLINE=600->700#1, VAL=1.01
Multiple generators with equal sharing
- Control two generators at bus 100 with ID
1and bus 200 with ID1using voltage droop control. The generators have equal machine base and represent two aggregated collector groups of a wind farm. Target voltage of1.01p.u. at bus 600, QBASE of50MVAr, droop percentage of4%and voltage deadband of0.01p.u. The static controller logic should not consider existing dispatch files and should ensure reactive power dispatch is shared equally.
CONTROL_VDROOP, GEN=[DEFINITION=100#1, RATIO=0.5], GEN=[DEFINITION=200#1, RATIO=0.5], QBASE=50, DROOP%=4, DEADBAND=0.01, ATBUS=600, ATLINE=600->700#1, VAL=1.01
Multiple generators with priority dispatch
- Control two generators with priority dispatch where the solar farm generator at bus 100 is prioritised before the BESS generator at bus 200. Target voltage of
1.0p.u. at bus 500, QBASE of100MVAr, droop percentage of5%and voltage deadband of0.02p.u.
CONTROL_VDROOP, GEN=[DEFINITION=100#1, PRIORITY=1], GEN=[DEFINITION=200#1, PRIORITY=2], QBASE=100, DROOP%=5, DEADBAND=0.02, ATBUS=500, ATLINE=500->600#1, VAL=1.0
Multiple generators with unequal power sharing
- Control two generators with unequal sharing where 70% of reactive power comes from the generator at bus 100 and 30% from the generator at bus 200. Target voltage of
1.02p.u. at bus 400, QBASE of75MVAr, droop percentage of3%and voltage deadband of0.015p.u.
CONTROL_VDROOP, GEN=[DEFINITION=100#1, RATIO=70], GEN=[DEFINITION=200#1, RATIO=30], QBASE=75, DROOP%=3, DEADBAND=0.015, ATBUS=400, ATLINE=400->500#1, VAL=1.02
Large wind farm with multiple generators and reactive power limits
- Control four generators at buses 100, 101, 200 and 201 (all with ID
1) with reactive power limits. Target voltage of1.0p.u. at bus 300, QBASE of200MVAr, droop percentage of6%, voltage deadband of0.01p.u., minimum reactive power limit of-150MVAr and maximum reactive power limit of150MVAr.
CONTROL_VDROOP, GEN=[DEFINITION=100#1], GEN=[DEFINITION=101#1], GEN=[DEFINITION=200#1], GEN=[DEFINITION=201#1], QBASE=200, DROOP%=6, DEADBAND=0.01, QMIN=-150, QMAX=150, ATBUS=300, ATLINE=300->400#1, VAL=1.0
CONTROL_VDIRECT Direct voltage control from generator(s)
CONTROL_VDIRECT, GEN=, GEN=..., ATBUS=, [VALSCALE=, VAL_FUNCTION=], VAL=
Controls one or more generators using direct voltage control (not voltage droop control). CONTROL_VDIRECT is a simpler command compared to the others.
Arguments
- CONTROL_VDIRECT
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - ATBUS (
int): Bus number which has the target voltage. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVAL(i.e.VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VAL 🔢 (
float): Target voltage set point [p.u.].
Basic direct voltage control
- Control the generator at bus 100 with ID
1. The control is direct voltage control of bus 300 with a target voltage of1.01p.u.
CONTROL_VDIRECT, GEN=100#1, ATBUS=300, VAL=1.01
Multiple generator voltage control
- Control two generators at bus 100 with ID
1and bus 200 with ID1using direct voltage control. The control is direct voltage control of bus 300 with a target voltage of1.03p.u.
CONTROL_VDIRECT, GEN=100#1, GEN=200#1, ATBUS=300, VAL=1.03
CONTROL_Q Reactive power from generator(s)
CONTROL_Q, GEN=[DEFINITION=, PRIORITY=1, RATIO=], GEN=[...], [ATLINE=, METERBUS=, VALSCALE=, VAL_FUNCTION=], VAL=
Uses a software-agnostic power plant controller to achieve a reactive power target. The target can be specified at the generator terminals, or at a remote line. Supports dispatch order and reactive power sharing (and a mixture of both).
Arguments
- CONTROL_Q
- GEN (
object): Generator definition with parameters on a per-generator level within square brackets[...]:- DEFINITION (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - PRIORITY 🔢 (
int)[Optional]:- Dispatch priority (order) for this generator. Only positive integers supported. Defaults to 1.
- Generators with the highest priority will be dispatched first as far as their operational limits allow, then generators in later orders are dispatched next.
- RATIO 🔢 (
float)[Optional]:- Sharing ratio for this generator. If
RATIO=0this generator will not contribute to achieving the target. Only values greater than or equal to zero supported. Defaults to generator base (in MVA). - Generators in the same
PRIORITYwill share the reactive power target based on theirRATIOvalues. - The engine will normalize all share values, so it can be ratios or percentages or pu etc.
- Sharing ratio for this generator. If
- DEFINITION (
- ATLINE (
pas)[Optional]: Location of the target reactive power.- If not specified, the reactive power target is regulated at the generator terminals.
- If
ATLINE=from->to#id(pas): Reactive power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVAL(i.e.VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VAL 🔢 (
float): Reactive power setpoint [MVAr].
Examples
Solar farm with single aggregated generator
- Control the aggregated generator at bus 100 with ID
1to achieve a target reactive power of0MVAr at the point of connection, between bus 400 and bus 500 with branch ID1.
CONTROL_Q, GEN=[DEFINITION=100#1], ATLINE=400->500#1, VAL=0
Solar farm with multiple aggregated generators
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target reactive power of0MVAr at the point of connection, between bus 400 and bus 500 with branch ID1. - The reactive power contribution from each generator should be shared equally.
CONTROL_Q, GEN=[DEFINITION=100#1, RATIO=0.5], GEN=[DEFINITION=200#2, RATIO=0.5], ATLINE=400->500#1, VAL=0
Solar farm with multiple aggregated generators and priority dispatch
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target reactive power of0MVAr at the point of connection, between bus 400 and bus 500 with branch ID1. - The reactive power contribution from each generator should be shared equally.
- Prioritize supplying reactive power from the aggregated solar farm generator at bus 100 before supplying any reactive power from the aggregated BESS generator at bus 200.
CONTROL_Q, GEN=[DEFINITION=100#1, PRIORITY=1], GEN=[DEFINITION=200#2, PRIORITY=2], ATLINE=400->500#1, VAL=0
Solar farm with multiple aggregated generators and unequal power sharing
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target reactive power of0MVAr at the point of connection, between bus 400 and bus 500 with branch ID1. - The reactive power contribution from each generator should be 70% from the aggregated solar farm generator at bus 100 and 30% from the aggregated solar farm generator at bus 200.
CONTROL_Q, GEN=[DEFINITION=100#1, RATIO=70], GEN=[DEFINITION=200#2, RATIO=30], ATLINE=400->500#1, VAL=0
Large wind farm with multiple aggregated generators, power sharing based on relative size
- Control the four aggregated generators at buses 100, 101, 200 and 201 - all with ID
1. - Achieve a reactive power target of
0MVAr at the point of connection, between bus 400 and bus 500 with branch ID1. - The reactive power contribution from each generator should be shared equally based on the relative size of each generator.
CONTROL_Q, GEN=[DEFINITION=100#1], GEN=[DEFINITION=101#1], GEN=[DEFINITION=200#1], GEN=[DEFINITION=201#1], ATLINE=400->500#1, VAL=0
CONTROL_PF - Control generator(s) power factor
CONTROL_PF, GEN=[DEFINITION=, PRIORITY=1, RATIO=], GEN=[...], [ATLINE=, METERBUS=, VALSCALE=, VAL_FUNCTION=], VAL=
Uses a software-agnostic power plant controller to achieve a power factor target. The target can be specified at the generator terminals, or at a remote line. Supports dispatch order and power factor control sharing (and a mixture of both).
Arguments
- CONTROL_PF
- GEN (
object): Generator definition with parameters on a per-generator level within square brackets[...]:- DEFINITION (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - PRIORITY 🔢 (
int)[Optional]:- Dispatch priority (order) for this generator. Only positive integers supported. Defaults to 1.
- Generators with the highest priority will be dispatched first as far as their operational limits allow, then generators in later orders are dispatched next.
- RATIO 🔢 (
float)[Optional]:- Sharing ratio for this generator. If
RATIO=0this generator will not contribute to achieving the target. Only values greater than or equal to zero supported. Defaults to generator base (in MVA). - Generators in the same
PRIORITYwill share the reactive power target based on theirRATIOvalues. - The engine will normalize all share values, so it can be ratios or percentages or pu etc.
- Sharing ratio for this generator. If
- DEFINITION (
- ATLINE (
pas)[Optional]: Location of the target power factor.- If not specified, the power factor target is regulated at the generator terminals.
- If
ATLINE=from->to#id(pas): Power factor target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVAL(i.e.VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VAL 🔢 (
float): Power factor setpoint. Using generator convention, positive power factor means injecting reactive power. Range is from -1.0 to 1.0.
Examples
Solar farm with single aggregated generator
- Control the aggregated generator at bus 100 with ID
1to achieve a target power factor of0.95(injecting reactive power) at the point of connection, between bus 400 and bus 500 with branch ID1.
CONTROL_PF, GEN=[DEFINITION=100#1], ATLINE=400->500#1, VAL=0.95
Solar farm with multiple aggregated generators
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target power factor of1.0(unity) at the point of connection, between bus 400 and bus 500 with branch ID1. - The power factor control contribution from each generator should be shared equally.
CONTROL_PF, GEN=[DEFINITION=100#1, RATIO=0.5], GEN=[DEFINITION=200#2, RATIO=0.5], ATLINE=400->500#1, VAL=1.0
Solar farm with multiple aggregated generators and priority dispatch
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target power factor of0.98(injecting reactive power) at the point of connection, between bus 400 and bus 500 with branch ID1. - The power factor control contribution from each generator should be shared equally.
- Prioritize supplying reactive power from the aggregated solar farm generator at bus 100 before supplying any reactive power from the aggregated BESS generator at bus 200.
CONTROL_PF, GEN=[DEFINITION=100#1, PRIORITY=1], GEN=[DEFINITION=200#2, PRIORITY=2], ATLINE=400->500#1, VAL=0.98
Solar farm with multiple aggregated generators and unequal power sharing
- Control the two aggregated generators at bus 100 with ID
1and bus 200 with ID2to achieve a target power factor of0.95(injecting reactive power) at the point of connection, between bus 400 and bus 500 with branch ID1. - The power factor control contribution from each generator should be 70% from the aggregated solar farm generator at bus 100 and 30% from the aggregated solar farm generator at bus 200.
CONTROL_PF, GEN=[DEFINITION=100#1, RATIO=70], GEN=[DEFINITION=200#2, RATIO=30], ATLINE=400->500#1, VAL=0.95
Large wind farm with multiple aggregated generators, power sharing based on relative size
- Control the four aggregated generators at buses 100, 101, 200 and 201 - all with ID
1. - Achieve a power factor target of
-0.95(absorbing reactive power) at the point of connection, between bus 400 and bus 500 with branch ID1. - The power factor control contribution from each generator should be shared equally based on the relative size of each generator.
CONTROL_PF, GEN=[DEFINITION=100#1], GEN=[DEFINITION=101#1], GEN=[DEFINITION=200#1], GEN=[DEFINITION=201#1], ATLINE=400->500#1, VAL=-0.95
Control load - Fixed reactive power control
CONTROL, LOAD=, Q=FIXED, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], QTARGET/YQTARGET=
Controls a load/shunt using fixed reactive power control.
Arguments:
- CONTROL
- LOAD (
pas): Load/shunt definition. Loads and shunts are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asFIXED. - Target reactive power set point. Options:
- QTARGET= 🔢 (
float): Target reactive power set point [MVAr] for constant power load; or - YQTARGET= 🔢 (
float): Target reactive power set point [MVAr] for constant admittance load.
- QTARGET= 🔢 (
- ATLINE: Location of the target reactive power. Options:
ATLINE=TERMINALS: Reactive power target is regulated at the load terminals.ATLINE=from->to#id(pas): Reactive power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toQTARGET(i.e.QTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toQTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions.
Only one LOAD= argument is supported per Command.
Example: Control the load at bus 100 which has an ID of 1. The control mode is fixed reactive power control of -10 MVAr across the line from bus 400 to bus 500 (measured at the 'from-side') which has an ID of 1.
CONTROL, LOAD=100#1, Q=FIXED, ATLINE=400->500#1, QTARGET=-10
Control load - Power factor control
CONTROL, LOAD=, Q=PF, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], PFTARGET=
Controls a load/shunt using power factor control.
Arguments:
- CONTROL
- LOAD (
pas): Load/shunt definition. Loads and shunts are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asPF. - ATLINE: Location of the target power factor. Options:
ATLINE=TERMINALS: Power factor target is regulated at the load terminals.ATLINE=from->to#id(pas): Power factor target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toPFTARGET(i.e.PFTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toPFTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - PFTARGET 🔢 (
float): Target power factor set point.
Only one LOAD= argument is supported per Command.
Example: Control the load at bus 100 which has an ID of 1. The control is power factor control of -0.97 at the load terminals.
CONTROL, LOAD=100#1, Q=PF, ATLINE=TERMINALS, PFTARGET=-0.97
Control load - Active power control
CONTROL, LOAD=, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], P/YP=
Controls the active power of a load/shunt.
Arguments:
- CONTROL
- LOAD (
pas): Load/shunt definition. Loads and shunts are defined using the following syntax:bus#id. - Load setpoint. Options:
- P 🔢 (
float): Active power target [MW] for constant power load; or - YP 🔢 (
float): Active power target [MW] for constant admittance load.
- P 🔢 (
- ATLINE Location of the target active power. Options:
ATLINE=TERMINALS: Active power target is regulated at the generator terminals.ATLINE=from->to#id(pas): Active power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toP(i.e.PxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toP. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions.
Only one LOAD= argument is supported per Command.
Example: Control the load at bus 100 which has an ID of 1. The active power set point is 22 MW and is applied across load terminals.
CONTROL, LOAD=100#1, ATLINE=TERMINALS, P=22
SOLVE Command
SOLVE, [LOCKTAPS=, LOCKSHUNTS=, IGNORE_CONTROL_IF_OFFLINE=]
Solves the static case, considering all previous SET and CONTROL Commands. CONTROL Commands are achieved by solving the static case, observing the monitored buses/lines (e.g. ATLINE=), comparing the observed value with the desired value and tolerance limits, adjusting the controlled elements (e.g. GEN=) if required and repeating this process as required.
Arguments:
- SOLVE
- LOCKTAPS (
str)[Optional]: Solution option specifying whether the position of transformer taps may change during the solution. Defaults toNO. Options:LOCKTAPS=YES: Transformer taps are locked.LOCKTAPS=NO: Transformer taps are unlocked (stepped taps).
- LOCKSHUNTS (
str)[Optional]: Solution option specifying whether the position of switched shunts may change during the solution. Defaults toNO. Options:LOCKSHUNTS=YES: Switched shunt positions are locked.LOCKSHUNTS=NO: Switched shunt positions are unlocked (stepped shunt steps).
- IGNORE_CONTROL_IF_OFFLINE (
str)[Optional]: Defaults toNO. Options:IGNORE_CONTROL_IF_OFFLINE=YES: AnyCONTROLcommands which have all assets offline are ignored when solving the case. This is typically only used for static load flow simulations as part of preliminary project development.IGNORE_CONTROL_IF_OFFLINE=NO: AllCONTROLcommands are considered, even for assets that are offline.
All SET, SCALE_TX and CONTROL Commands preceding a SOLVE Command are applied at the same time when the SOLVE Command is used. Multiple SOLVE Commands are supported and can be used when you want to apply SET and CONTROL Commands sequentially. For example:
SET COMMAND 1
SET COMMAND 2
CONTROL COMMAND 1
SOLVE
CONTROL COMMAND 2
SOLVE
The following two static solves will occur:
- Solve considering
SET COMMAND 1,SET COMMAND 2, andCONTROL COMMAND 1; then - Solve considering
CONTROL COMMAND 2.
Example: Solve the case where transformer taps are not locked and where switched shunt positions are locked.
SOLVE, LOCKTAPS=NO, LOCKSHUNTS=YES
OUTPUT Command
Only one value can be output per OUTPUT Command.
The Node automatically outputs .sav cases ready for use by connected PSS®E Dynamic Nodes. Therefore, you don't need to specify this output.
Output bus value
OUTPUT, BUS=, VAL=, [VALSCALE=, VAL_FUNCTION=], NAME=
Outputs a value from a bus.
Arguments:
- OUTPUT
- BUS (
int): Bus number. - VAL (
str): Bus value. Options:VAL=V: Voltage [p.u.].VAL=VKV: Voltage [kV].VAL=ANGLE: Angle [degrees].
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
Example: Output the voltage [p.u] at bus 100 and name the Internode Variable 'busvolts'.
OUTPUT, BUS=100, VAL=V, NAME=i_busvolts
Output line value
OUTPUT, LINE=, VAL=, [RATING_NAME=, METERBUS=, VALSCALE=, VAL_FUNCTION=], NAME=
Outputs a value from a line.
Arguments:
- OUTPUT
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. Values are output at the 'from-side' of the line. - VAL (
str): Line value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor (generator convention,P/S) [unitless]. Click here for details on how gridmo calculates power factor.VAL=LOAD%: Thermal loading using the 'RATE1' field [%].VAL=RATING: Line rating [MVA]. RequiresRATING_NAME=to be specified.
- RATING_NAME (
str)[Optional]: Name of the rating to be output (e.g. "RATE1"). Only required ifVAL=RATING. - METERBUS (
int)[Optional]: Bus number which is the metering point for theLINE=line. Default value is the 'from' bus number as per theLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
Example: Output the active power flowing through the line from bus 100 to bus 200 (measured at the 'from-side') which has an ID of 1. Name the Internode Variable 'p_at_line'.
OUTPUT, LINE=100->200#1, VAL=P, NAME=i_p_at_line
Output transformer value
OUTPUT, TX=, VAL=, [RATING_NAME=, WINDING=, METERBUS=, VALSCALE=, VAL_FUNCTION=], NAME=
Outputs a value from a transformer.
Arguments:
- OUTPUT
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - VAL (
str): Transformer value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor (generator convention,P/S) [unitless]. Click here for details on how gridmo calculates power factor.VAL=TAPRATIO: Tap ratio of the winding with the highest base voltage - as this is most likely where the tap changer is present (decimal, such as 0.90 meaning 90% of default tap) [unitless].VAL=LOAD%: Thermal loading using the 'RATE1' field [%].VAL=RATING: Transformer rating [MVA]. RequiresRATING_NAME=to be specified. RequiresWINDING=to be specified for three-winding transformers.
- RATING_NAME (
str)[Optional]: Name of the rating to be output (e.g. "RATE1"). Only required ifVAL=RATING. - WINDING (
int)[Optional]: Winding number for outputting transformer rating. Only required ifVAL=RATINGand the transformer has three-windings. - METERBUS (
int)[Optional]: Bus number which is the metering point for theTX=line. Default value is the 'from' bus number as per theTX=argument. Not supported for three-winding transformers. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
The OUTPUT, TX= Command has limited support for three-winding transformers. Specifically, measuring power flow through a three-winding transformer is not recommended as, in this gridmo Command, it is ambiguous where the metering is occurring.
Using METERBUS= is not supported for three-winding transformers as it is unclear what direction to assign to 'positive' power flow - for more information see Error 114.
If you need to monitor a three-winding transformer, please consider instead using a 'dummy' line (a line with zero impedance) and monitoring that line.
Example: Output the apparent power flowing through the transformer located between bus 100 to bus 200 which has an ID of 2. Name the Internode Variable i_tx_sload.
OUTPUT, TX=100->200#2, VAL=S, NAME=i_tx_sload
Output generator value
OUTPUT, GEN=, VAL=, [VALSCALE=, VAL_FUNCTION=], NAME=
Outputs a value from a generator.
Arguments:
- OUTPUT
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - VAL (
str): Generator value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor (generator convention,P/S) [unitless]. Click here for details on how gridmo calculates power factor.VAL=LOAD%: Thermal loading using the 'RATE1' field [%].
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
Example: Output the reactive power flowing through the generator located at bus 100 which has an ID of 1. Name the Internode Variable 'i_gen_terminal_q'.
OUTPUT, GEN=100#1, VAL=Q, NAME=i_gen_terminal_q
Output load value
OUTPUT, LOAD=, VAL=, [VALSCALE=, VAL_FUNCTION=], NAME=
Outputs a value from a load.
Arguments:
- OUTPUT
- LOAD (
pas): Load/shunt definition. Loads and shunts are defined using the following syntax:bus#id. - VAL (
str): Load value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor (load convention,P/S) [unitless]. Click here for details on how gridmo calculates power factor.
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
The following sign convention is used in the outputs:
- Positive P: Load is consuming active power.
- Negative P: Load is generating active power (e.g. a generator is modelled as a 'negative load').
- Positive Q: Load is consuming reactive power (e.g. a reactive load).
- Negative Q: Load is generating reactive power (e.g. a capacitive load).
- Positive power factor: A load which is consuming reactive power (e.g. a reactive load).
- Negative power factor: A load which is generating reactive power (e.g. a capacitive load).
Example: Output the active power flowing into a load located at bus 100 which has an ID of 1. Name the Internode Variable 'p_load'.
OUTPUT, LOAD=100#1, VAL=P, NAME=p_load
Output voltage droop target value
OUTPUT, VAL=VDROOPTARGET, QBASE=, DROOP%=, DEADBAND=, QMIN=, QMAX=, ATBUS=, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], NAME=
Outputs the expected target voltage set point [p.u.] for a pre-defined voltage droop characteristic.
Arguments:
- OUTPUT
- VAL (
str): Voltage droop characteristic value. Options:VAL=VDROOPTARGET: Target voltage set point [p.u.].
- QBASE 🔢 (
float): Base reactive power [MVAr]. - DROOP% 🔢 (
float): Droop percentage [%]. - DEADBAND 🔢 (
float): Voltage deadband [p.u.]. - QMIN 🔢 (
float): Minimum reactive power limit at theATLINE=line [MVAr]. - QMAX 🔢 (
float): Maximum reactive power limit at theATLINE=line [MVAr]. - ATBUS (
int): Bus number which has the target voltage. - ATLINE (
pas): Line which is used for measuring the reactive power. Lines are defined using the following syntax:from->to#id. - METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node.
Example: Output the voltage droop target given the measured voltage at bus 500, the reactive power flow from bus 400 to 500 (id 1) metered at the bus 500 end, using 80 MVAr as the reactive power base, QMAX of 60 MVAr, QMIN of -60 MVAr and with a droop of 6%. Name the Internode Variable i_poc_vdroop_target.
OUTPUT, VAL=VDROOPTARGET, QBASE=80, DROOP%=6, DEADBAND=0, QMIN=-60, QMAX=60, ATBUS=500, ATLINE=400->500#1, METERBUS=500, NAME=i_poc_vdroop_target
Advanced Parameters
Each Advanced Parameter is entered on its own line as name=value.
Example: Reduce the convergence gain to 0.1, increase the maximum iteration limit to 1000, and set the voltage tolerance to 1e-4 [p.u.].
node.convergence.gain=0.1
max_iter=1000
voltages.tolerance=1e-4
node.convergence.gain
- Description: Defines the proportional gain used by the convergence algorithm. Large generators connected to weak networks with low droop percentages may require a gain lower than default to converge.
- Type:
float - Units: N/A
- Default: 0.2
- Range: > 0
node.convergence.gain=value
node.convergence.mva
- Description: Defines the acceptable tolerance error in the convergence algorithm. A load/generator is deemed converged when the absolute value of the difference (between actual and target values) is less than this value.
- Type:
float - Units: MW or MVAr
- Default: 0.001
- Range: > 0
node.convergence.mva=value
node.convergence.converge_at_limit
- Description: Defines if a generator in a
CONTROLCommand, which cannot achieve the control target due to hitting its minimum or maximum reactive power limit (as per the PSS®E Case file), is considered converged. For example, a generator is asked to regulate to 22 MVAr, but it can only inject 20 MVAr. If this Advanced Parameter is set toYes, the generator is treated as converged. If this Advanced Parameter is set toNothe generator will prevent the static study solution from converging. Regardless of the setting, an Engine warning is raised if a generator reaches its minimum or maximum reactive power capability. - Type:
bool - Units: N/A
- Default: Yes
- Range: Yes, No
node.convergence.converge_at_limit=value
system.convergence.mva
- Description: Defines the acceptable whole-network MVA mismatch. A network is deemed converged and stable when the mismatch is less than this value.
- Type:
float - Units: MVA
- Default: 0.5
- Range: > 0
system.convergence.mva=value
max_iter
- Description: Defines the acceptable number of iterations during Case file and generator/load control mode convergence. Very sensitive control modes (low droop % values) or weak networks may require higher than default max_iter to converge.
- Type:
int - Units: N/A
- Default: 500
- Range: > 0
max_iter=value
voltages.tolerance
- Description: Defines the acceptable voltage tolerance for the static study. Voltage regulation schemes are considered on target when the actual voltage is within this value (+/- the voltage tolerance).
- Type:
float - Units: p.u.
- Default: 1e-5
- Range: 0 - 1
voltages.tolerance=value
stop.on.extreme.voltages
- Description: If
YES, the Engine will stop the static study from converging if any bus voltage is lower or higher than0.05p.u. below the bounds as calculated below:- Lower bound is the lower of
0.85p.u. and the lowest bus voltage in the input case file. - Upper bound is the upper of
1.15p.u. and the highest bus voltage in the input case file.
- Lower bound is the lower of
For example, if the highest bus voltage in the input case file is 1.17 p.u. and this Advanced Parameter is set to YES, the Engine will stop the static study from converging if any bus voltage is higher than 1.17 + 0.05 = 1.22 p.u.
- Type:
bool - Units: N/A
- Default: Yes
- Range: Yes, No
stop.on.extreme.voltages=value
voltages.lower
voltages.lower is deprecated in v1.4.21.1 and will be removed in a future release. Please use stop.on.extreme.voltages=no to stop the gridmo Engine from converging if any bus voltage is too low.
- Description: Defines the acceptable lower voltage bound for the static study. Any buses with voltage lower than this value will prevent the case from converging. A network is deemed converged and stable when all in-service buses have per unit voltage higher than this value.
- Type:
float - Units: p.u.
- Default: 0.85
- Range: ≥ 0
voltages.lower=value
voltages.higher
voltages.higher is deprecated in v1.4.21.1 and will be removed in a future release. Please use stop.on.extreme.voltages=no to stop the gridmo Engine from converging if any bus voltage is too high.
- Description: Defines the acceptable upper voltage bound for the static study. Any buses with voltage higher than this value will prevent the case from converging. A network is deemed converged and stable when all in-service buses have per unit voltage lower than this value.
- Type:
float - Units: p.u.
- Default: 1.15
- Range: ≥ 0
voltages.higher=value
system.swingbus.ignorevolt
- Description: Should the swing bus (type 3 bus in PSS®E model) be excluded from the voltage tolerance checks? This value defaults to
Yeswhich is typically appropriate for SMIB studies. For full system model studies, setting this value toNois recommended, but not mandatory. - Type:
bool - Units: N/A
- Default: Yes
- Range: Yes / No
system.swingbus.ignorevolt=value
low.scr.mode
To use low SCR mode, the PSS®E Static Node must have:
- Exactly one
SOLVEcommand. - Exactly one
SET, LINE=, SCR=, XR=command. - A
VDIRECTcommand for the Thévenin equivalent source regulating the connection point voltage.
By setting low.scr.mode=Yes, the gridmo Engine will convert your SOLVE into a multi-step solve to converge your SMIB model to very low SCR values.
Specifically, the first series of iterations solves the case at a relatively high SCR (of 25). The second solve is a two-stage iterative process, quadratically ramping the Thévenin equivalent impedance until the target SCR is reached. The point of connection voltage is then adjusted to ensure the target voltage is maintained. The final solve is a single iteration to ensure the case remains in a converged state.
- Description: Enables a low SCR mode where impedance changes (via
SET, LINE=, SCR=, XR=) are slowly ramped during aSOLVEcommand. - Type:
bool - Units: N/A
- Default: No
- Range: Yes / No
low.scr.mode=value
legacy.invalid.number.support
If set to Yes, sets additional PSS®E settings to reduce PSS®E crashes if PSS®E encounters an invalid number (e.g. NaN value). However, we're aware that this can cause some user-defined models to crash if they don't also support these invalid numbers.
Prior to gridmo Engine v1.7.0, this was enabled by default, but is now disabled by default.
- Type:
bool - Units: N/A
- Default: No
- Range: Yes / No
legacy.invalid.number.support=value
output.solved.case
Places the solved case file into the outputs directory with the name specified. If no file extension is provided, .sav will be added.
- Type:
str - Units: N/A
- Default: None
- Range: N/A
output.solved.case=value.sav
output.converged.case
output.converged.case is deprecated in v1.12.0 and will be removed in a future release. Please use output.solved.case instead.
Places the converged case file into the outputs directory with the name specified. If no file extension is provided, .sav will be added.
- Type:
str - Units: N/A
- Default: None
- Range: N/A
output.converged.case=value.sav
Deprecated Commands
The following commands are no longer recommended for new Projects as they have been replaced with new commands with expanded functionality.
These older commands will continue to be supported and you do not need to update any of your existing gridmo Projects to use these new commands, unless you need to use the new functionality.
Control generator - Direct voltage control
CONTROL, GEN=, Q=VDIRECT, ATBUS=, [QMIN=, QMAX=, VALSCALE=, VAL_FUNCTION=, VTARGET=]
Controls one generator using direct voltage control (not droop control).
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asVDIRECT. - ATBUS (
int): Bus number which has the target voltage. - QMIN (
float)[Optional]: Minimum reactive power capability of the generator [MVAr]. Default value is as per the generator's configuration in the PSS®E case file. - QMAX (
float)[Optional]: Maximum reactive power capability of the generator [MVAr]. Default value is as per the generator's configuration in the PSS®E case file. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVTARGET(i.e.VTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VTARGET 🔢 (
float)[Optional]: Target voltage set point [p.u.]. Default value is the voltage specified in theScheduled Voltagefield (withinPlant Data) for the specified generator.
Example: Control the generator at bus 100 which has an ID of 1. The control is direct voltage control of bus 300 with a target voltage of 1.01 [p.u.]. The generator can supply reactive power between -10 MVAr and +15 MVAr.
CONTROL, GEN=100#1, Q=VDIRECT, QMIN=-10, QMAX=15, ATBUS=300, VTARGET=1.01
Example: Control the generator at bus 1257 which has an ID of 1. The control is direct voltage control of bus 1000 with a target voltage of 1.02 [p.u.]. Do not change the reactive power limits of the generator from its current definition as per the case file.
CONTROL, GEN=1257#1, Q=VDIRECT, ATBUS=1000, VTARGET=1.02
Control generator - Droop voltage control
CONTROL, GEN=, [GEN=], Q=VDROOP, QBASE=, DROOP%=, DEADBAND=, [QMIN=, QMAX=], ATBUS=, ATLINE=, [METERBUS =, VALSCALE=, VAL_FUNCTION=], VTARGET=, [CONSIDER_EXISTING_DISPATCH=YES]
Controls one or more generators using voltage droop control. If the measured voltage is larger/smaller than the voltage target + deadband, the specified generators will be controlled to absorb/supply reactive power equal to the droop percentage of QBASE for every 1% the measured voltage is above the voltage target + deadband.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asVDROOP. - QBASE (
float): Base reactive power [MVAr]. - DROOP% (
float): Droop percentage [%]. - DEADBAND (
float): Voltage deadband [p.u.]. - QMIN (
int)[Optional]: Minimum reactive power limit at theATLINE=line [MVAr]. Default value is -∞. - QMAX (
int)[Optional]: Maximum reactive power limit at theATLINE=line [MVAr]. Default value is ∞. - ATBUS (
int): Bus number which has the target voltage. - ATLINE Line which is used for measuring the reactive power. Options:
ATLINE=TERMINALS: Reactive power target is regulated at the generator terminals.ATLINE=from->to#id(pas): Reactive power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVTARGET(i.e.VTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - VTARGET 🔢 (
float): Target voltage set point [p.u.]. Default value is the voltage specified in theScheduled Voltagefield (withinPlant Data) for the specified generator. - CONSIDER_EXISTING_DISPATCH (
bool)[Optional]: Defaults toYES. Options:CONSIDER_EXISTING_DISPATCH=YES: The static controller logic considers the existing reactive power dispatch values in the case file (i.e. Qgen) for the controlled generators. If the existing dispatch values are not distributed equally amongst the controlled generators according to their machine MVA ratings, they will likely remain unequal.CONSIDER_EXISTING_DISPATCH=NO: The existing dispatch values are ignored and dispatch values are forced to be distributed equally amongst the controlled generators according to their machine MVA ratings.
Example: A PPC exists between bus 600 and bus 700 (ID=1) and is controlling a generator at bus 100 which has an ID of 1. The PPC is acting in voltage droop control with a target voltage of 1.01 [p.u.] at bus 600, a QBASE of 50 MVAr, a droop percentage of 4% and a voltage deadband of 0.01 [p.u.].
CONTROL, GEN=100#1, Q=VDROOP, QBASE=50, DROOP%=4, DEADBAND=0.01, ATBUS=600, ATLINE=600->700#1, VTARGET=1.01
Example: A PPC exists between bus 600 and bus 700 (ID=1) and is controlling two generators at bus 100 which has an ID of 1 and at bus 200 which has an ID of 1. The PPC is controlling two generators with equal machine base (which represent two aggregated collector groups of a wind farm). The PPC is acting in voltage droop control with a target voltage of 1.01 [p.u.] at bus 600, a QBASE of 50 MVAr, a droop percentage of 4% and a voltage deadband of 0.01 [p.u.]. The static controller logic should not consider the existing dispatch files in the case file and should ensure that the reactive power dispatch is shared equally across the two generators.
CONTROL, GEN=100#1, GEN=200#1, Q=VDROOP, QBASE=50, DROOP%=4, DEADBAND=0.01, ATBUS=600, ATLINE=600->700#1, VTARGET=1.01, CONSIDER_EXISTING_DISPATCH=NO
Control generator - Fixed reactive power control
CONTROL, GEN=, [GEN=], Q=FIXED, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], QTARGET=, [CONSIDER_EXISTING_DISPATCH=YES]
Controls one or more generators using fixed reactive power control. The reactive power target will be applied across the specified line.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asFIXED. - ATLINE: Location of the target reactive power. Options:
ATLINE=TERMINALS: Reactive power target is regulated at the generator terminals.ATLINE=from->to#id(pas): Reactive power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toQTARGET(i.e.QTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toQTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - QTARGET (
float): Target reactive power set point [MVAr]. - CONSIDER_EXISTING_DISPATCH (
bool)[Optional]: Defaults toYES. Options:CONSIDER_EXISTING_DISPATCH=YES: The static controller logic considers the existing reactive power dispatch values in the case file (i.e. Qgen) for the controlled generators. If the existing dispatch values are not distributed equally amongst the controlled generators according to their machine MVA ratings, they will likely remain unequal.CONSIDER_EXISTING_DISPATCH=NO: The existing dispatch values are ignored and dispatch values are forced to be distributed equally amongst the controlled generators according to their machine MVA ratings.
Example: Control the generator at bus 100 which has an ID of 1. The control mode is fixed reactive power control regulating -20 MVAr across the line from bus 400 to bus 500 (measured at the 'to-side') which has an ID of 1.
CONTROL, GEN=100#1, Q=FIXED, ATLINE=400->500#1, METERBUS=500, QTARGET=-20
Example: Control two generators. The first generator has a machine base of 100MVA and is at bus 1500 with ID of 1. The second generator has a machine base of 100MVA and is at bus 1505 with ID of 2. The control mode is fixed reactive power control regulating -20 MVAr across the line from bus 400 to bus 500 (measured at the 'to-side') which has an ID of 1. The static controller logic should not consider the existing dispatch files in the case file and should ensure that the reactive power dispatch is shared equally across the two generators.
CONTROL, GEN=1500#1, GEN=1505#2, Q=FIXED, ATLINE=400->500#1, METERBUS=500, QTARGET=-20, CONSIDER_EXISTING_DISPATCH=NO
Example:
Control two generators to achieve 15 MVAr each at their respective terminals. The two generators have ID of 1 and are located on bus 123 and 456 respectively. The generators must be the same size (machine base). CONSIDER_EXISTING_DISPATCH= cannot be used with multiple ATLINE=TERMINALS arguments.
CONTROL, GEN=123#1, GEN=456#1, Q=FIXED, ATLINE=TERMINALS, QTARGET=15
Control generator - Power factor control
CONTROL, GEN=, [GEN=], Q=PF, ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], PFTARGET=, [CONSIDER_EXISTING_DISPATCH=YES]
Controls one or more generators using power factor power control.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - Q (
str): Reactive power control methodology. Set asPF. - ATLINE: Location of the target power factor. Options:
ATLINE=TERMINALS: Power factor target is regulated at the generator terminals.ATLINE=from->to#id(pas): Power factor target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toPFTARGET(i.e.PFTARGETxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toPFTARGET. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - PFTARGET (
float): Target power factor set point. - CONSIDER_EXISTING_DISPATCH (
bool)[Optional]: Defaults toYES. Options:CONSIDER_EXISTING_DISPATCH=YES: The static controller logic considers the existing reactive power dispatch values in the case file (i.e. Qgen) for the controlled generators. If the existing dispatch values are not distributed equally amongst the controlled generators according to their machine MVA ratings, they will likely remain unequal.CONSIDER_EXISTING_DISPATCH=NO: The existing dispatch values are ignored and dispatch values are forced to be distributed equally amongst the controlled generators according to their machine MVA ratings.
Example: Control the generator at bus 100 which has an ID of 1. The control is power factor control of -0.97 at the generator terminals.
CONTROL, GEN=100#1, Q=PF, ATLINE=TERMINALS, PFTARGET=-0.97
Example:
Control two generators to achieve 0.95 injecting power factor each at their respective terminals. The two generators have ID of 1 and are located on bus 123 and 456 respectively. The generators must be the same size (machine base). CONSIDER_EXISTING_DISPATCH= cannot be used with multiple ATLINE=TERMINALS arguments.
CONTROL, GEN=123#1, GEN=456#1, Q=PF, ATLINE=TERMINALS, PFTARGET=0.95
Control generator - Active power control
CONTROL, GEN=, [GEN=], ATLINE=, [METERBUS=, VALSCALE=, VAL_FUNCTION=], P=, [CONSIDER_EXISTING_DISPATCH=YES]
Controls the active power of one or more generators.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - ATLINE Location of the target active power. Options:
ATLINE=TERMINALS: Active power target is regulated at the generator terminals.ATLINE=from->to#id(pas): Active power target is regulated across the specified line. Lines are defined using the following syntax:from->to#id.
- METERBUS (
int)[Optional]: Bus number which is the metering point for theATLINE=line. Default value is the 'from' bus number as per theATLINE=argument. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toP(i.e.PxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toP. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - P (
float): Active power target [MW]. - CONSIDER_EXISTING_DISPATCH (
bool)[Optional]: Defaults toYES. Options:CONSIDER_EXISTING_DISPATCH=YES: The static controller logic considers the existing active power dispatch values in the case file (i.e. Pgen) for the controlled generators. If the existing dispatch values are not distributed equally amongst the controlled generators according to their machine MVA ratings, they will likely remain unequal.CONSIDER_EXISTING_DISPATCH=NO: The existing dispatch values are ignored and dispatch values are forced to be distributed equally amongst the controlled generators according to their machine MVA ratings.
Example: A PPC has a target active power set point and is controlling two generators at bus 100 (ID=1) and bus 200 (ID=1). The active power set point is 95 MW and is applied across the line from bus 400 to bus 500 (measured at the 'from-side') which has an ID of 1.
CONTROL, GEN=100#1, GEN=200#1, ATLINE=400->500#1, P=95
Example:
Control two generators to achieve 59 MW each at their respective terminals. The two generators have ID of 1 and are located on bus 123 and 456 respectively. The generators must be the same size (machine base). CONSIDER_EXISTING_DISPATCH= cannot be used with multiple ATLINE=TERMINALS arguments.
CONTROL, GEN=123#1, GEN=456#1, ATLINE=TERMINALS, P=59