PSS®E Dynamic
Introduction
The PSS®E Dynamic Node performs dynamic study simulations which are powered by PSS®E, a 3rd party power systems software. It leverages the following PSS®E modules:
- Dynamic Simulation
This Node is typically used for the following:
- Completing dynamic studies (e.g. validating Generator Performance Standards).
- Benchmarking plant models (e.g. comparing the performance of PSS®E and PSCAD™ plant models).
Check our system requirements page for information on which PSS®E versions are currently supported.
User inputs
Select model
Title
Defines the title of the Node.
Example:
DMAT | Table 1
Model
Defines the input directory and file name of the PSS®E case file, including the .sav file extension. To use the PSS®E case file (.sav) from a linked PSS®E Static Node, select Use model from linked PSS®E Static Node.
Example:
sunny-solar-farm\SMIB.sav
File paths are relative to the Engine's 'inputs' directory, as defined by the Engine configuration parameter dirs.inputs. For example, if dirs.inputs was set as C:\Users\johnsmith\gridmo\Inputs\:
| Absolute file path | Relative file path (required by gridmo) |
|---|---|
| C:\Users\johnsmith\gridmo\Inputs\sunny-solar-farm\SMIB.sav | sunny-solar-farm\SMIB.sav |
Dynamics model data
Defines the input directory and file name of the PSS®E dynamics model data file, including the .dyr file extension.
Example:
sunny-solar-farm\settings.dyr
Alternatively, specify a directory and all .dyr files in the directory will be loaded into PSS®E. Selecting the inputs directory itself is not allowed.
Example of loading all in a folder:
sunny-solar-farm\
Dynamics user models
Defines the input directory of the PSS®E dynamics user models.
All potential supporting files (e.g. .exe files called by wrapper models) within the specified folder will be copied and available for use in the dynamic simulation.
Example:
sunny-solar-farm\dll-folder
All .dll files located in the specified folder will be loaded into PSS®E. Ensure all .dll files in this folder are compatible with the PSS®E version you are using. Selecting the inputs directory itself is not allowed.
Define simulation
Simulation time
Defines the duration of the dynamic study in seconds.
Example: Run a 30 second dynamic simulation.
30
The minimum simulation time is 0.1 seconds.
🔢 Supports mathematical operations.
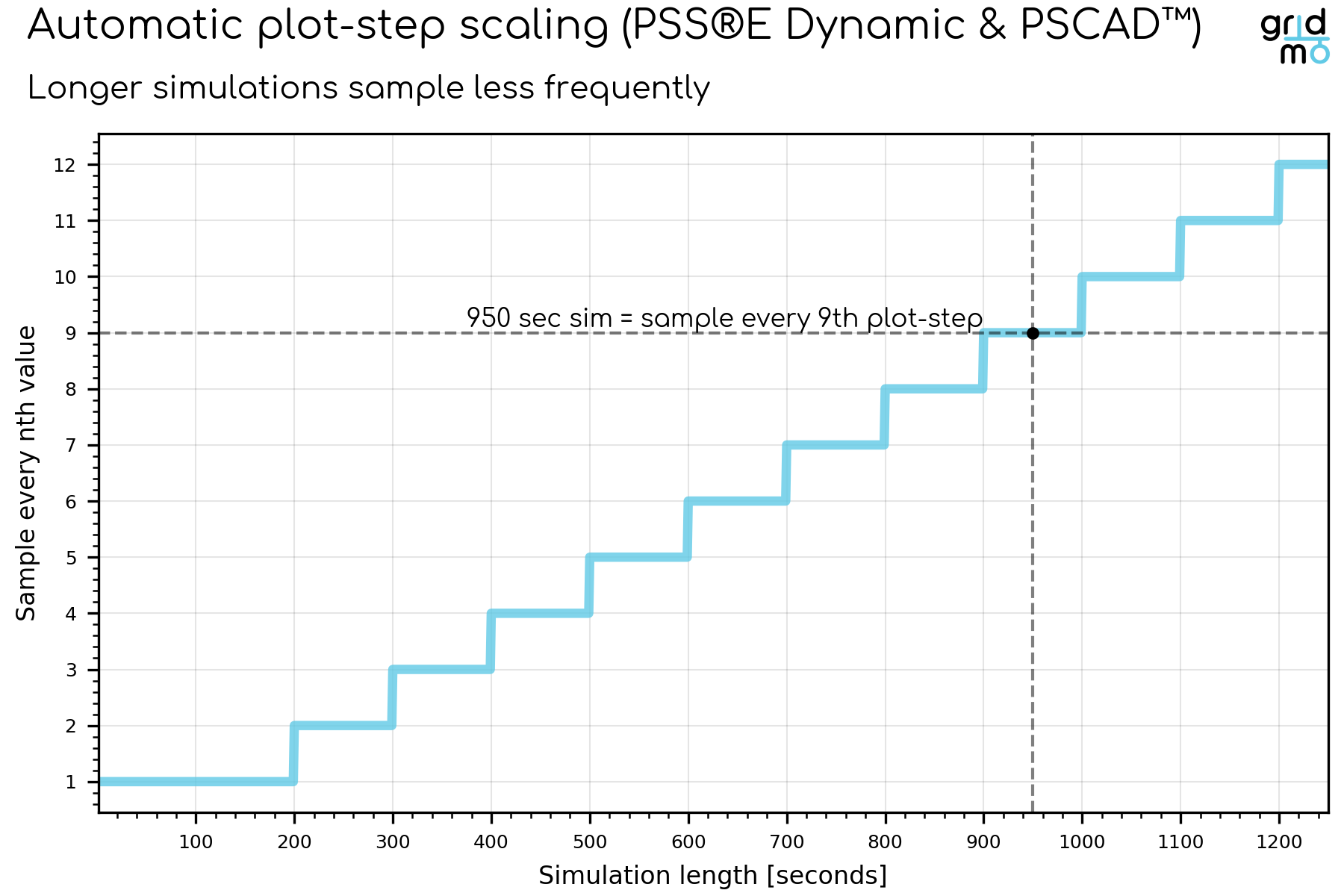
The resolution of the output data (plot step) is automatically reduced if the simulation time is above 200 seconds.
This is to reduce size of output files and temporary files generated during the simulation.
Note gridmo Engine versions v1.9 and v1.10 had this feature temporarily disabled (plot step was not automatically reduced).
For example, if gridmo is running a 950 second long simulation, gridmo will set PSS®E's plot step so that one channel data point is exported for every nine time steps, based on the below relationship.
Control Thévenin equivalent source
These controls allow you to define the behaviour of the grid.
The grid is modelled as an infinite bus generator for SMIB studies. One of the following may be controlled in a Node:
- Voltage [p.u.]
- Frequency [Hz]
- Angle [degrees]
To use the SMIB control functionality, the PSS®E case file must be configured as follows:
- The case file (
.sav) has a single slack bus with a single slack generator. - The case file (
.sav) has a single line between the slack bus and the plant model. This line represents the Thévenin equivalent source impedance of the infinite bus.
Example of a correctly configured PSS®E case file:
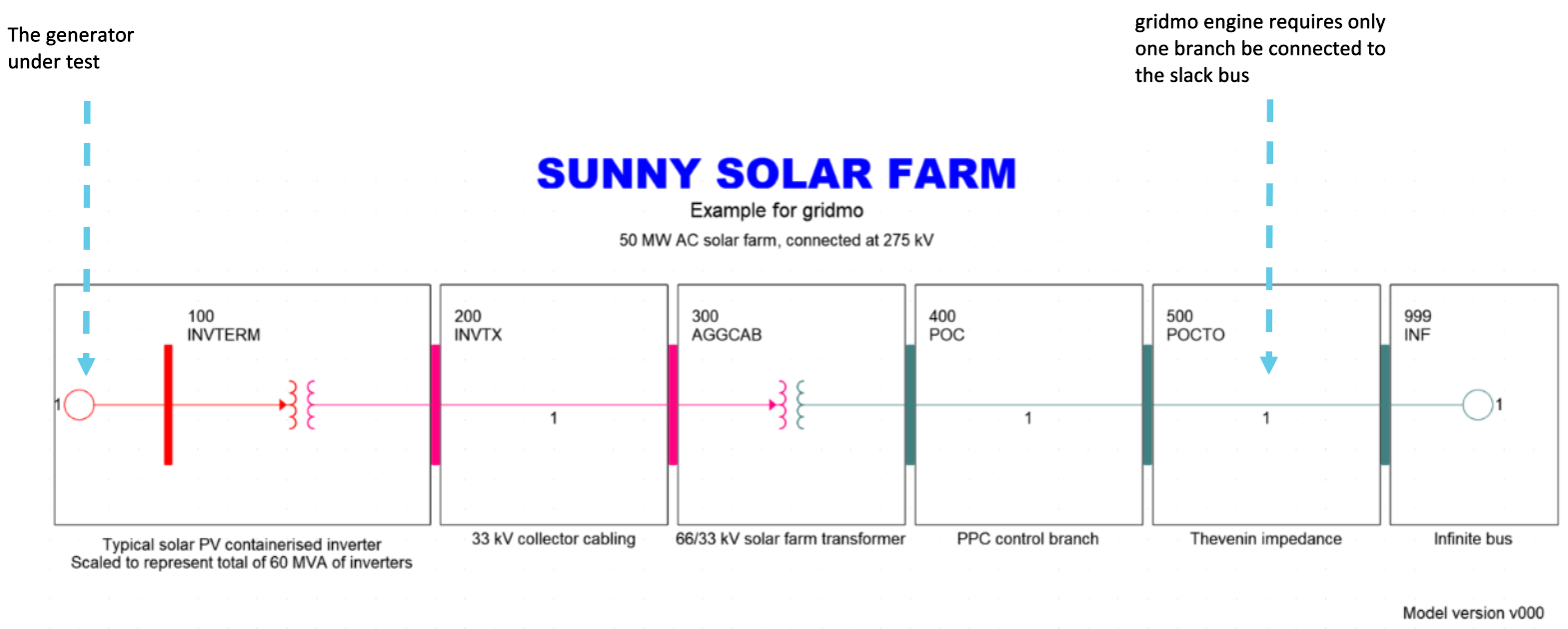
If SMIB control functionality is enabled, the slack bus generator dynamic model (e.g. GENCLS) will be replaced with PLBVF1 or PLBVFU1 model (as required by your version of PSS®E) to allow voltage and frequency playback.
Voltage
Defines the infinite bus generator voltage throughout the dynamic simulation. Enter a series of time [s], voltage [p.u.] pairs. The voltage is linearly interpolated between points. There are two methods for specifying the voltage - absolute and relative.
If your PSS®E dynamic study uses a case file from a linked PSS®E Static Node, it is often convenient to specify the voltage using the relative method, since it will utilise the infinite bus generator voltage solution from that specific case.
Specifying absolute voltage
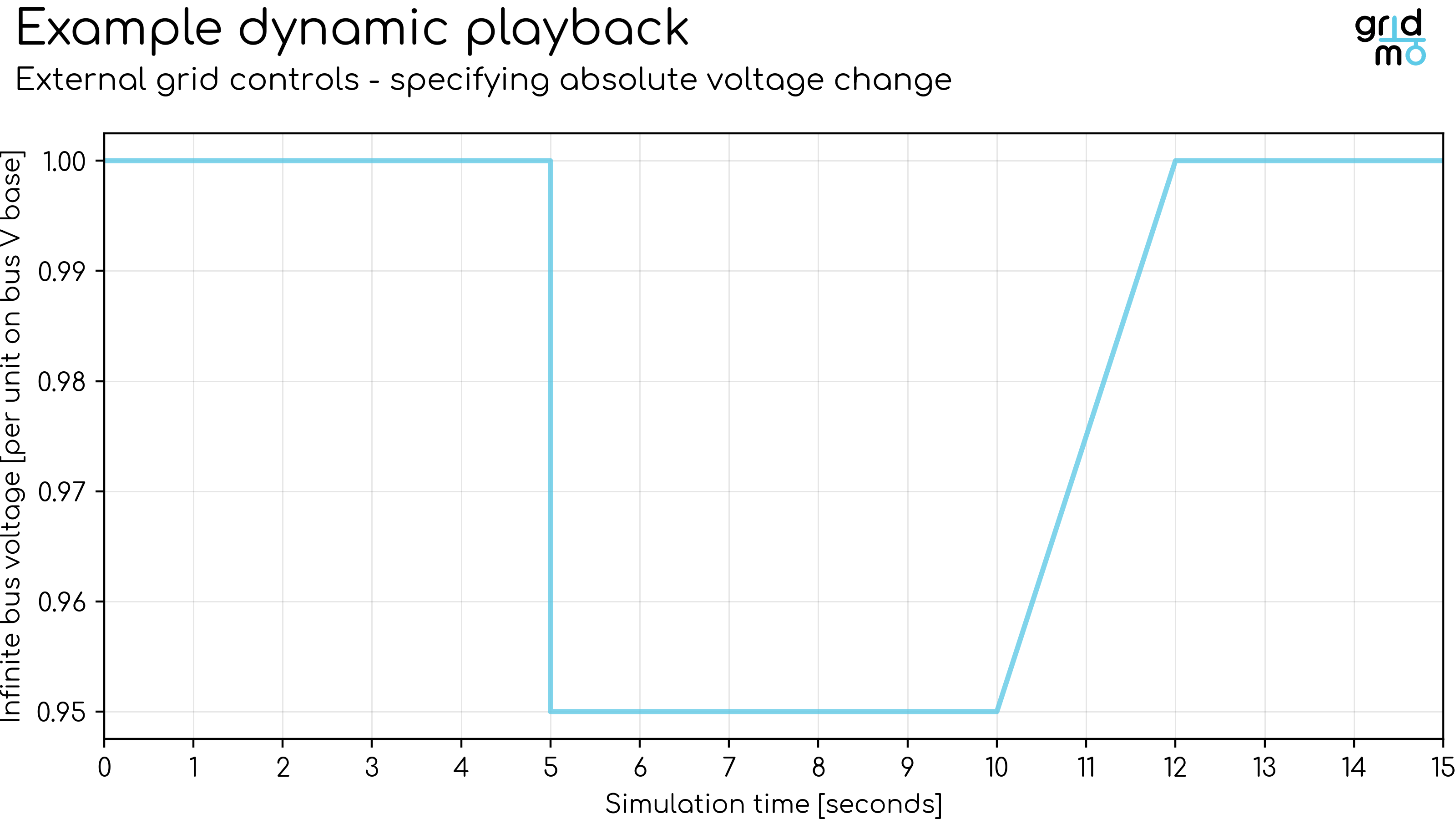
Defines the infinite bus generator voltage throughout the dynamic simulation by specifying absolute voltage [p.u.].
Example: Perform a 15 second dynamic simulation. At 5 seconds, step the voltage from 1.00 [p.u.] to 0.95 [p.u.] in a single rapid step. At 10 seconds, ramp the voltage back up to 1.00 [p.u.] over 2 seconds.
Example
0, 1.00
4.9999, 1.00
5, 0.95
10, 0.95
12, 1.00
15, 1.00
Plot
Specifying relative voltage
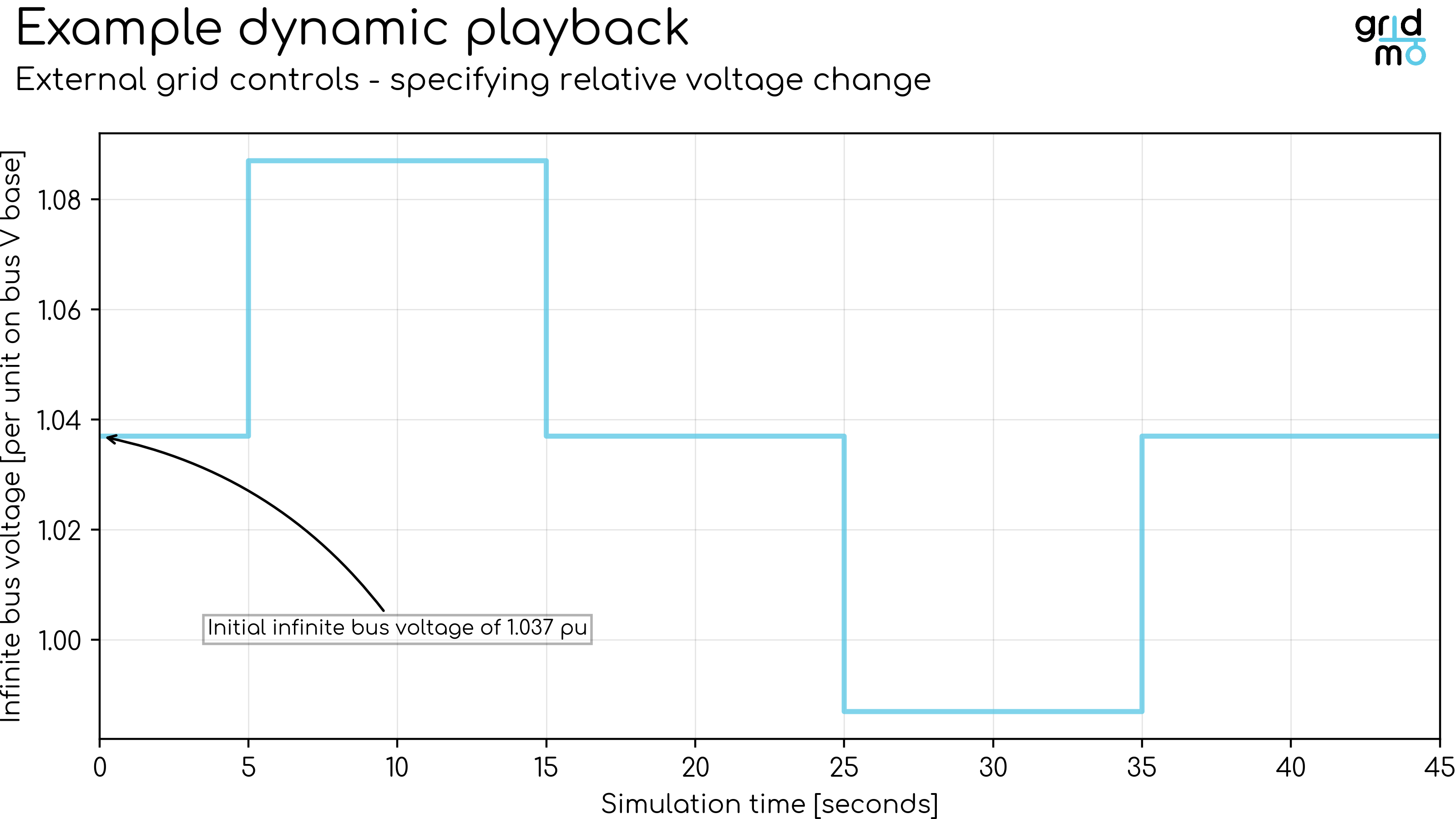
Defines the infinite bus generator voltage throughout the dynamic simulation by specifying relative voltage [pu]. The voltage change is relative to the voltage of the infinite bus generator voltage at the start of the dynamic simulation.
Example: Perform a 45 second dynamic simulation. At 5 seconds, step the voltage up 0.05 per unit (pu) in a single rapid step. At 15 seconds, step the voltage down to its initial value in a single rapid step. At 25 seconds, step the voltage down 0.05 per unit (pu) in a single rapid step. At 35 seconds, step the voltage up to its initial value in a single rapid step.
Example
0, 0 pu
4.999, 0 pu
5, +0.05 pu
14.999, +0.05 pu
15, 0 pu
24.999, 0 pu
25, -0.05 pu
34.999, -0.05 pu
35, 0 pu
45, 0 pu
Plot
Frequency
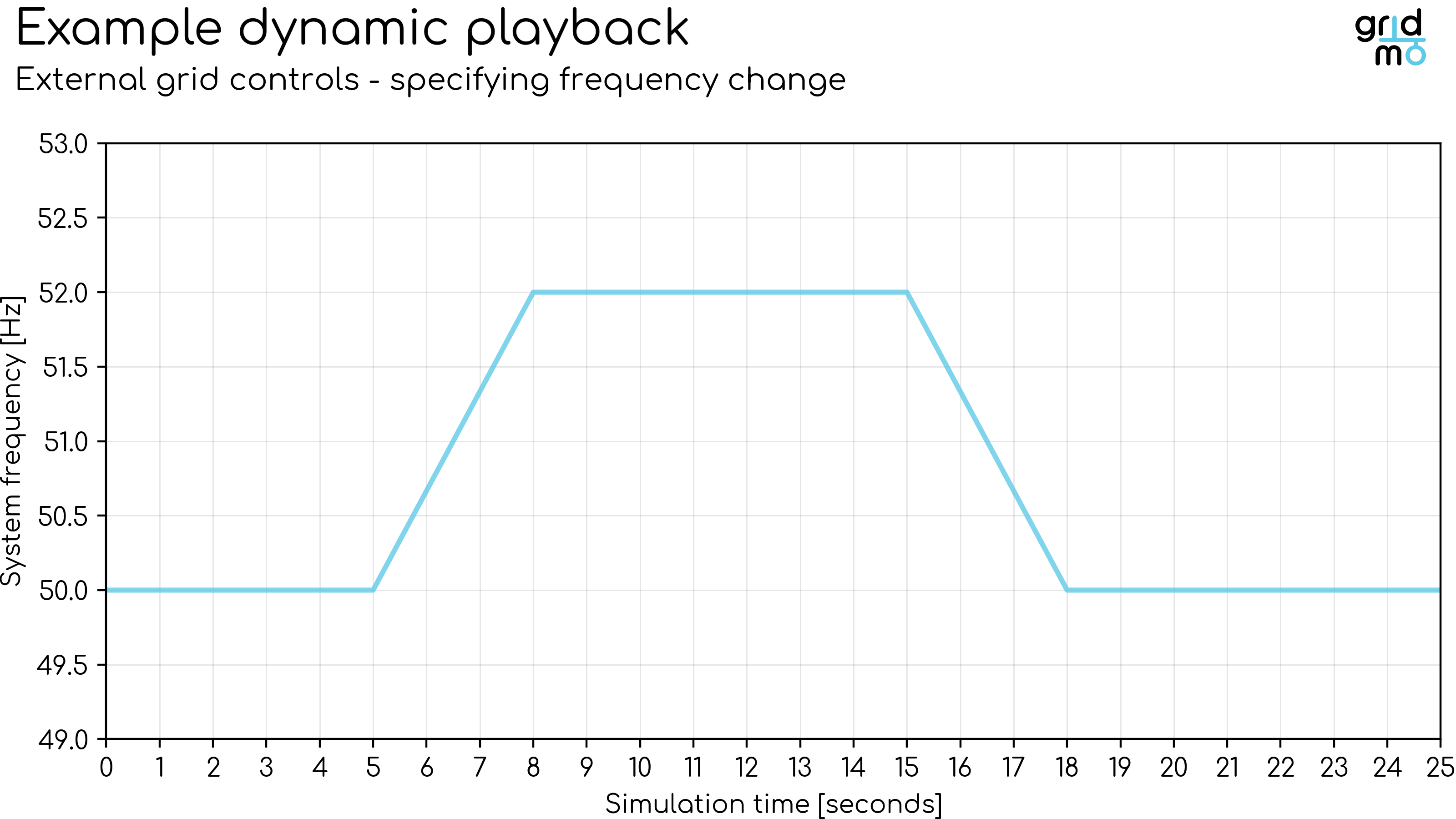
Defines the infinite bus frequency throughout the dynamic simulation. Enter a series of time [s], frequency [Hz] pairs. The frequency is linearly interpolated between points.
Example: Perform a 25 second dynamic simulation. At 5 seconds, ramp the frequency up from 50.0 [Hz] to 52.0 [Hz] over 3 seconds. At 15 seconds, ramp the frequency back down to 50.0 [Hz] over 3 seconds.
Example
0, 50
5, 50
8, 52
15, 52
18, 50
25, 50
Plot
Angle
Defines the infinite bus voltage phase angle throughout the dynamic simulation. Enter a series of time [s], angle [degrees] pairs. The voltage phase angle is not linearly interpolated between points - instead the angle is set to the absolute value at the time specified. The voltage phase angle values specified are relative to the initial angle at the infinite bus - which is typically 0° for SMIB studies. The phase angle is modified by inserting a lossless two-winding transformer next to the infinite bus, as shown below.
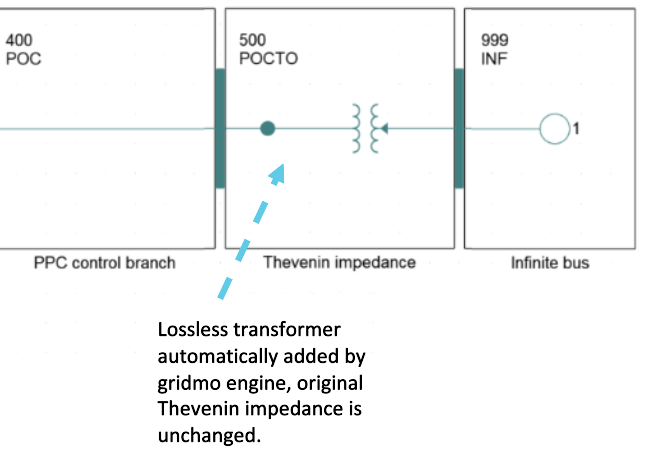
Voltage phase angle changes are instantaneous. Ramps are not supported.
The following Commands are not supported in the same simulation as an angle playback:
SIMPLEFAULTMULTIFAULTTOVTESTVDISTURBANCE
The insertion of the lossless two-winding transformer next to the Thevenin equivalent bus causes a change in the line definition of the Thevenin equivalent impedance.
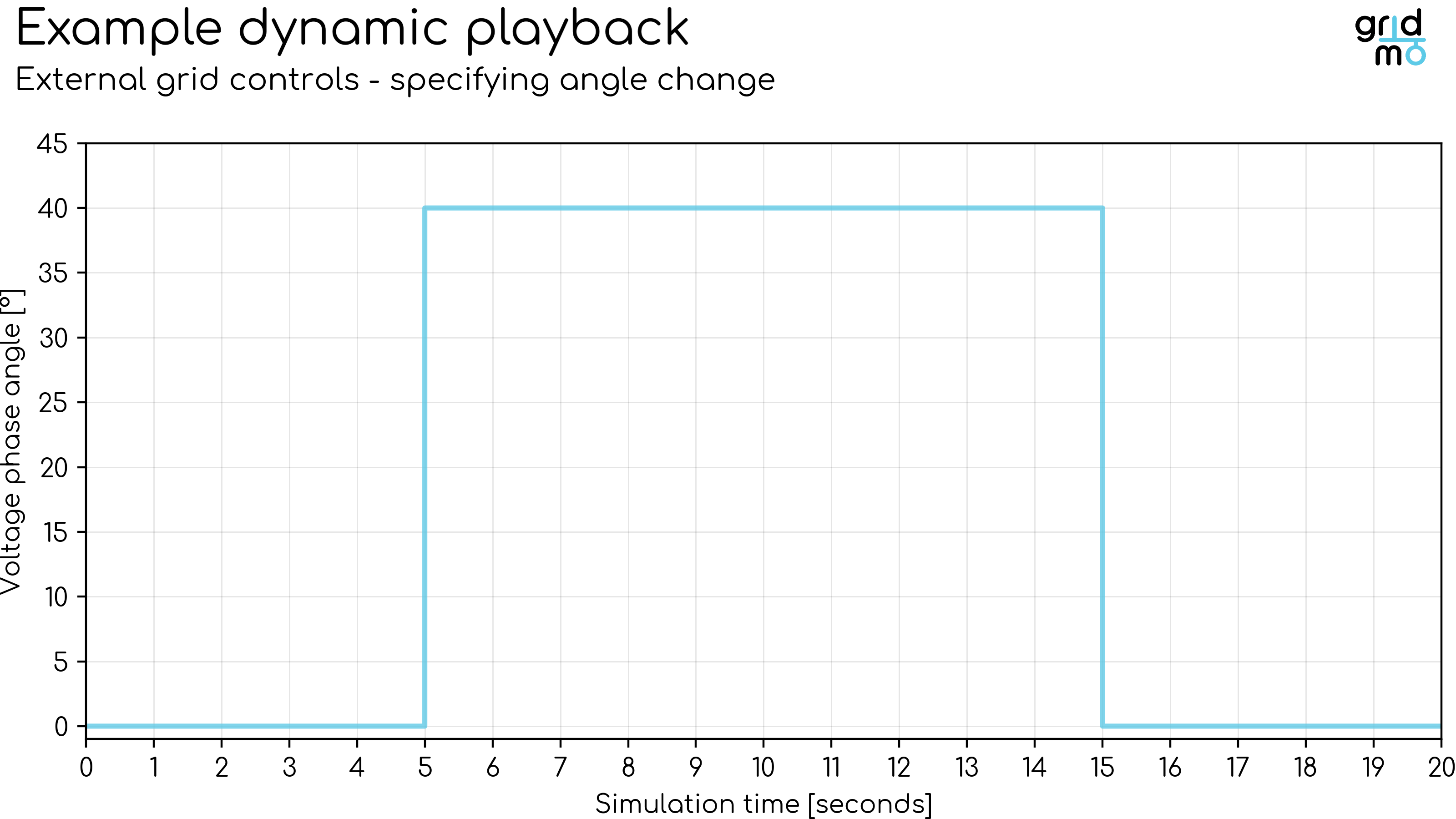
Example: Perform a 20 second dynamic simulation. At 5 seconds, step the voltage phase angle from 0° to 40°. At 15 seconds, step the voltage phase angle back to 0°.
Example
0, 0
5, 40
15, 0
Plot
Merge into network
This is used in conjunction with the PSS®E Static Node Network functionality which allows you to merge your model into a network model.
Network dynamics model data
Defines the input directory and file name of the network PSS®E dynamics model data file, including the .dyr file extension. This PSS®E dynamics model data is appended to the data specified in the Dynamics model data file.
Example:
network-model\settings.dyr
Alternatively, specify a directory and all .dyr files in the directory will be loaded into PSS®E. Selecting the inputs directory itself is not allowed.
Example of loading all in a folder:
network-model\psse\
Network dynamics user models
Defines the input directory of the network PSS®E dynamics user models. These PSS®E dynamics user models are added to the user models specified in the PSS®E dynamics user models folder.
All potential supporting files (e.g. .exe files called by wrapper models) within the specified folder will be copied and available for use in the dynamic simulation.
Example:
network-model\dll-folder
All .dll files located in the specified folder will be loaded into PSS®E. Ensure all .dll files in this folder are compatible with the PSS®E version you are using. Selecting the inputs directory itself is not allowed.
Actions
Defines the Commands which configure the dynamic simulation.
Supported Commands:
- ADD: Adds a new network element for a fixed duration (e.g. capacitor, reactor).
- SET: Sets the status or value of a network element (e.g. bus, line, generator).
- SET_DYRMODEL: Sets the status of a dynamic model attached to a network element (e.g. bus, generator, load).
- CONTROL: Controls a network element.
- SIMPLEFAULT: Applies a simple power system fault.
- MULTIFAULT: Applies a simple power system fault.
- BUS_FAULT: Applies a fault at a bus. The fault can be transient in nature, or result in protection operating to disconnect the bus.
- LINE_FAULT: Applies a fault on a transmission line. The fault can be transient in nature, or result in protection operating to disconnect the line, with optional auto reclose logic.
- VDISTURBANCE: Applies a relative over or under voltage disturbance using a fault or shunt (capacitor).
- SCALE_LOADS: Scales all loads in a model (or an area within that model) by a specified factor.
- SCALE_TX: Scales a single transformer's base power, used to simulate a variable number of aggregated transformers.
Old Commands (not recommended for new projects):
- TOVTEST: Completes a Transient Over-Voltage (TOV) test.
- ADVFAULT: Applies an advanced power system fault.
We have limited support for linear ramping between specified control signals. The argument, RAMP_FROM_PREVIOUS=YES may be when the following conditions are met:
- The Command must be a
CONTROLCommand which is controlling a CON, ICON, VAR or GREF. - There must be a previous Command which exactly matches all arguments other than the
RAMP_FROM_PREVIOUSargument. - The Command must use
VAL=, notRELVAL=. - The Command must only have one
GEN=orBUS=argument.
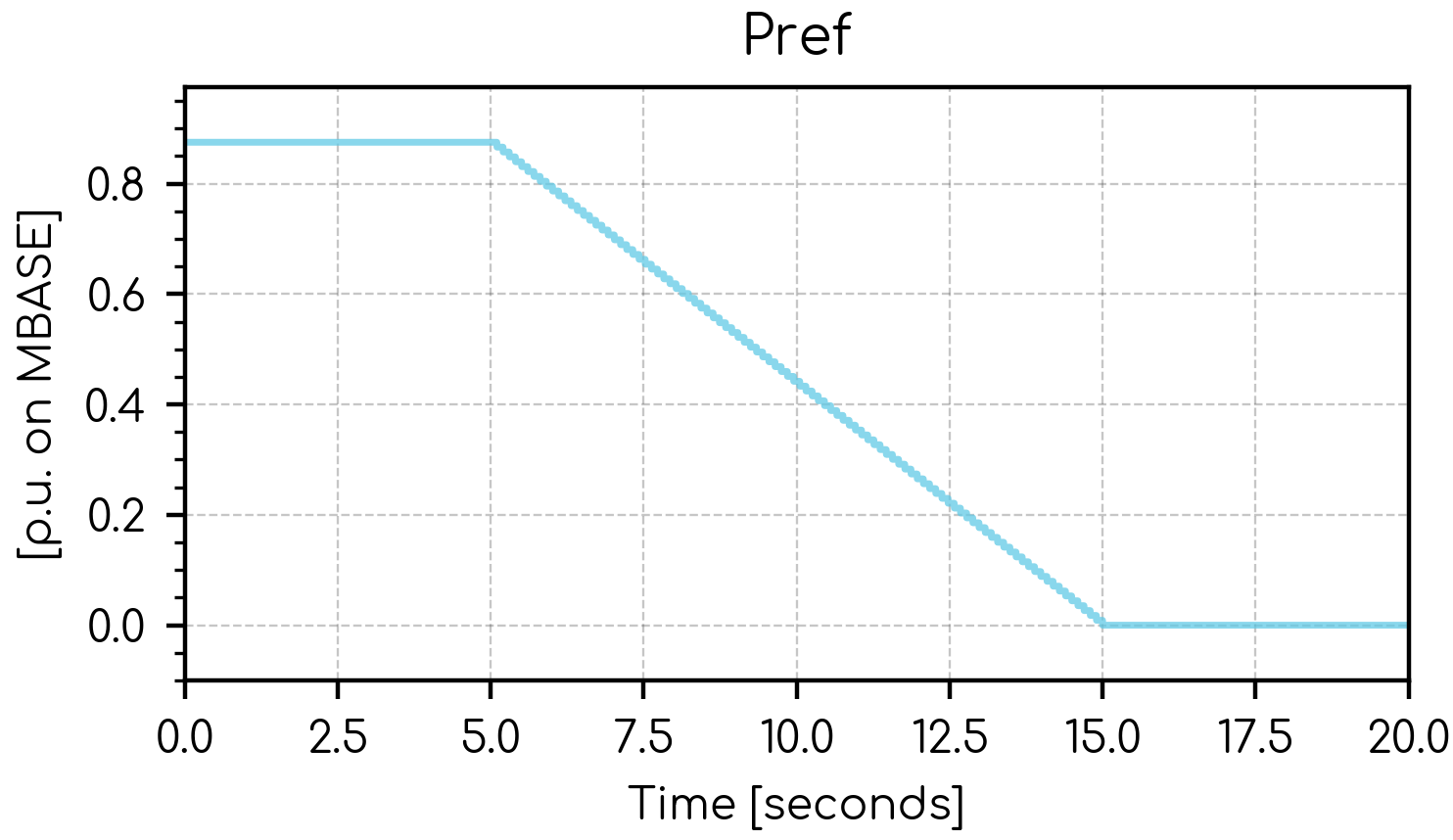
The following is a valid use of this functionality to ramp Pref from 0.875 [p.u.] to 0 [p.u.] over 10 seconds:
CONTROL, GEN=91003#S1, DYRMODEL=REPCA1, VAR=L+3, VAL_FUNCTION=0.875*VAL, AT=5, VAL=1
CONTROL, GEN=91003#S1, DYRMODEL=REPCA1, VAR=L+3, VAL_FUNCTION=0.875*VAL, AT=15, VAL=0, RAMP_FROM_PREVIOUS=YES
Note that PSS®E does not natively support linear ramping of signals. We therefore create many small changes over many different time steps to create a 'near-linear' ramp (see example image below).
For all Action Commands which include the AT= argument, which specifies the time [s] at which the Command is applied.
Specifying AT=0 will apply the Command at the very first time step once the dynamic simulation has been initialised.
Specifying AT=-1 will apply the Command at once the dynamic data record has been loaded, but before the dynamic simulation has been initialised.
If you specify the value of the AT= argument beyond the simulation duration (e.g. simulation duration is 20 [s] and AT=25), the Command will not be applied and a warning will be raised.
Define outputs
Outputs
Defines the output channels of the dynamic simulation. The output channels defined here may be used later for plotting and/or further analysis.
Supported Commands:
- OUTPUT: Outputs a network element's dynamic simulation values as an Internode Variable.
OUTPUT Commands do not require the AT= argument because dynamic simulation values are recorded for the entire simulation.
Description
Defines a short description of the dynamic simulation. This description will appear in the legend of any plot of the data generated by this Node.
Example:
Description here!
Advanced
PSS®E version
Defines the PSS®E version used for the Node. Defaults to Engine configuration.
gridmo Engine v1.5.0 onwards supports partial versions. See here for details.
PSS®E Python API
Defines the PSS®E API version used for the Node. Defaults to Engine configuration.
Distance factor
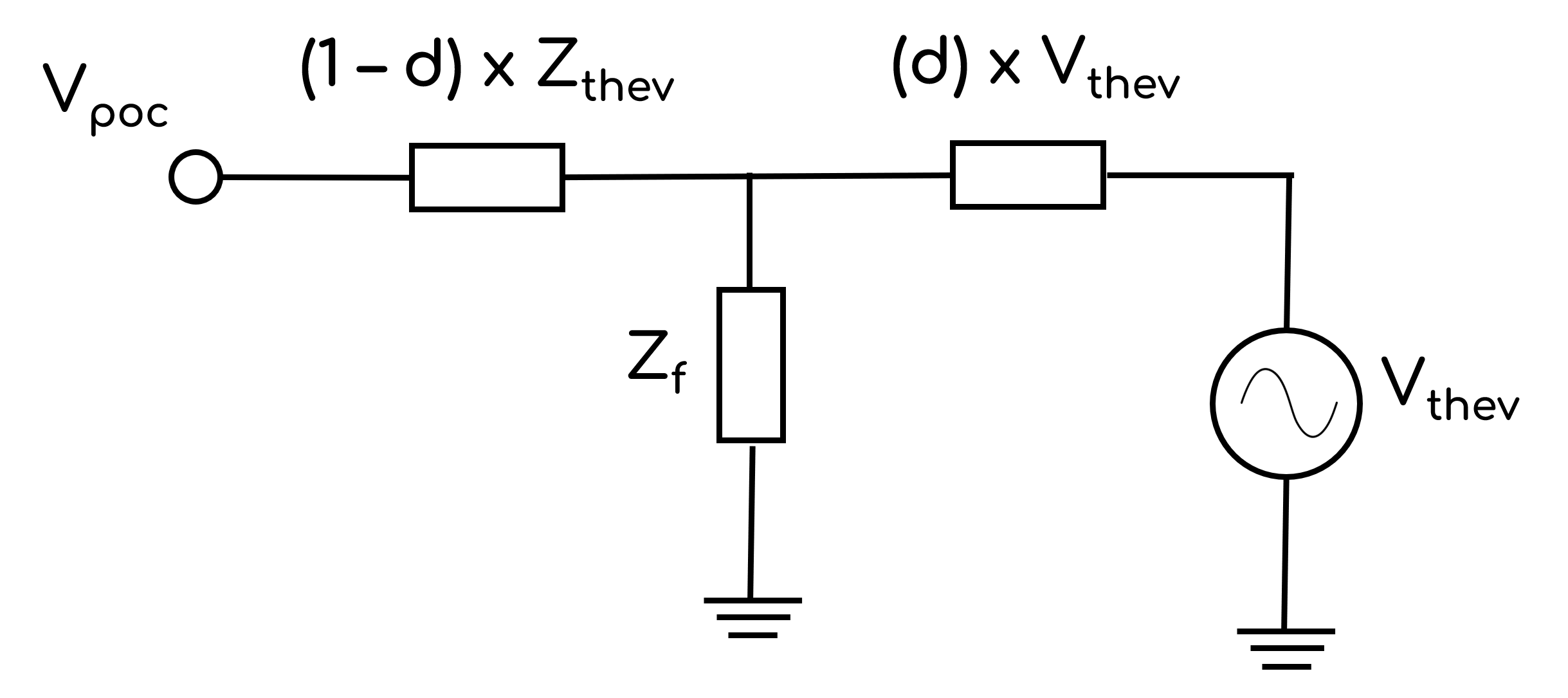
Defines the distance from the connection point at which disturbances are applied. Allowable values are between 0 and 1, where d=1 applies disturbances at the connection point. The image below shows a Thévenin equivalent of the grid as used in SMIB studies, commonly referred to as the 'infinite source', whereby:
- Vthev: Thévenin equivalent voltage source.
- Zthev: Thévenin equivalent impedance.
- Zf: Disturbance impedance.
- d: Distance factor.
- Vpoc: Connection point voltage prior to any disturbance.
Distance factor will apply to all relevant Commands in the Node such as:
TOVTESTVDISTURBANCESIMPLEFAULTMULTIFAULT
Advanced Parameters
Advanced Parameters allow users to configure test details which are not commonly used. Advanced Parameters are often specific to each Node type.
Each line represents a new Advanced Parameter and is entered as a=b format, where a is the name of the Parameter and b is the corresponding value. All Advanced Parameters are set to their default values if they are not included in the Advanced Parameters field.
Example: Set Advanced Parameter, sample.parameter to a value of 5.
sample.parameter=5
API Reference
This section details the Commands and Advanced Parameters specific to the Node.
Lines are defined using the following syntax: from->to#id. When completing SMIB studies, we recommend always having the 'to' bus closer to the connection point. Note that the 'from' and 'to' definitions used in Commands (i.e. from->to#id) don't necessarily need to match the .sav case.
ADD Command
Add capacitor
ADD, TYPE=CAP, BUS=, AT=, DURATION=, Q=
Adds a capacitor onto a bus for a fixed duration.
Arguments:
- ADD
- TYPE (
str): Network element type. Set asCAP. - BUS (
int): Bus number. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DURATION 🔢 (
float): Fixed duration [ms]. When the duration has expired, the capacitor is disconnected and the bus will remain in-service. - Q 🔢 (
float): Reactive power rating of the capacitor [MVAr].
Example: Add a 20 MVAr capacitor to bus 500, turning the capacitor on at 5 seconds and off again at 5.8 seconds.
ADD, TYPE=CAP, BUS=500, AT=5, DURATION=800, Q=20
Add reactor
ADD, TYPE=REACTOR, BUS=, AT=, DURATION=, Q=
Adds a reactor onto a bus for a fixed duration.
Arguments:
- ADD
- TYPE (
str): Network element type. Set asREACTOR. - BUS (
int): Bus number. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DURATION 🔢 (
float): Fixed duration [ms]. When the duration has expired, the reactor is disconnected and the bus will remain in-service. - Q 🔢 (
float): Reactive power rating of the reactor [MVAr].
Example: Add a 80 MVAr reactor to bus 200, turning the reactor on at 11 seconds and off at 12.7 seconds.
ADD, TYPE=REACTOR, BUS=200, AT=11, DURATION=1700, Q=80
gridmo automatically manages the bus identifiers of capacitors and reactor to avoid clashes with existing assets.
SET Command
Set bus
SET, BUS=, [BUS=], AT=, STATUS=
Sets the status of a bus.
Arguments:
- SET
- BUS (
int): Bus number. - BUS (
int)[Optional]: Additional bus numbers. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str): Bus status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
Example: At 5 seconds, set bus 100 out of service.
SET, BUS=100, AT=5, STATUS=OUT
Set line
SET, LINE=, [LINE=, AT=, STATUS=, SCR=, XR=]
Sets the status and impedance of a line.
Arguments:
- SET
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - LINE (
pas)[Optional]: Additional line definitions (only if usingSTATUS=,SCR=andXR=arguments only support one line) - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str)[Optional]: Line status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- SCR (
float)[Optional] Set the Short Circuit Ratio and X/R Ratio::SCR=X(whereXis a number): Sets the impedance of the given line to the equivalent Thévenin impedance based on the Project's rated active power [MW], the line voltage and the specified SCR and X/R ratio.SCR=INF: Sets the impedance of the given line to the minimum cross-software stable impedance.XR=Argument is ignored and X/R ratio is forced to infinite.
- XR 🔢 (
float)[Optional]: Sets the impedance of the given line to the equivalent Thévenin impedance based on the Project's rated active power [MW], the line voltage and the specified SCR and X/R ratio.
SCR and XR Arguments must be used together. These Arguments are typically only used in SMIB studies and are used to calculate the Thévenin equivalent source impedance of the infinite generator.
Example: At 14.7 seconds, set the impedance of the line from bus 800 to bus 900 which has an ID of 1. The line impedance should represent the system Thévenin equivalent impedance for an SCR of 3 and X/R ratio of 2.
SET, LINE=800->900#1, AT=14.7, STATUS=IN, SCR=3, XR=2
Set transformer
SET, TX=, AT=, [STATUS=, TAPRATIO=, WINDING=]
Sets the status of a transformer.
Arguments:
- SET
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str)[Optional]: Transformer status. If not specified, transformer status is not changed from the current state. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- TAPRATIO 🔢 (
float)[Optional]: Sets the tap ratio of the specified winding number. - WINDING (
int)[Optional]: The winding number used when setting the tap ratio. Options:WINDING=1: Winding number 1.WINDING=2: Winding number 2.WINDING=3: Winding number 3 (only applicable for three-winding transformers).
The Engine will check that the specified tap ratio is valid given the transformer tap configuration.
If the transformer does not have a tap changer enabled, or the transformer's configuration does not allow the specified tap ratio, the Engine will raise an error.
Example: At 2 seconds, set the three-winding transformer in-service which is located between bus 100, bus 200, and bus 300 and which has an ID of 1.
SET, TX=100->200->300#1, AT=2, STATUS=IN
Example: After 10 seconds in the dynamic simulation, set the tap position of winding one of the two-winding transformer to 0.975 which is located between bus 100 and bus 200 and which has an ID of 1.
SET, AT=10, TX=100->200#1, TAPRATIO=0.975, WINDING=1
Set generator
SET, GEN=, [GEN=], AT=, STATUS=, [QMAX=, QMIN=, PMAX=, PMIN=, MBASE=, VALSCALE=, VAL_FUNCTION=]
Sets the status of a generator.
Arguments:
- SET
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str): Generator status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
- QMAX 🔢 (
float)[Optional]: Maximum reactive power capability of the generator [MVAr]. - QMIN 🔢 (
float)[Optional]: Minimum reactive power capability of the generator [MVAr]. - PMAX 🔢 (
float)[Optional]: Maximum active power capability of the generator [MW]. - PMIN 🔢 (
float)[Optional]: Minimum active power capability of the generator [MW]. - MBASE 🔢 (
float)[Optional]: Base MVA of the generator [MVA]. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toQMAX,QMIN,PMAXandPMIN(i.e.PMAXxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toQMAX,QMIN,PMAXandPMIN. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions.
Changing active/reactive power limits during a dynamic simulation may not be supported by all user-defined models.
Consider using AT=-1 to set the limits before the dynamic simulation is initialised, or make the change in a linked PSS®E Static Node using a SET Command.
Example: At 19 seconds, set the generator out of service which is located at bus 100 which has an ID of 1.
SET, GEN=100#1, AT=19, STATUS=OUT
Example: Set the aggregated generator at bus 150 with id 1 active power min and maximum range to -1.5 MW prior to dynamic model initialisation (for example, to represent a synchronous machine operating in synchronous condenser mode).
SET, GEN=150#1, AT=-1, PMIN=-1.5, PMAX=-1.5
Set load
SET, LOAD=, AT=, STATUS=
Sets the status of a load.
Arguments:
- SET
- LOAD (
pas): Load definition. Loads are defined using the following syntax:bus#id. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str): Load status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
Example: At 45 seconds, set the load out of service which is located at bus 100 and which has an ID of 2.
SET, LOAD=100#2, AT=45, STATUS=OUT
Set fixed shunt
SET, FSHUNT=, AT=, STATUS=
Sets the status of a fixed shunt.
Arguments:
- SET
- FSHUNT (
pas): Fixed shunt definition. Fixed shunts are defined using the following syntax:bus#id. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - STATUS (
str): Fixed shunt status. Options:STATUS=IN: Status is in-service.STATUS=OUT: Status is out of service.
In PSS®E, fixed shunts are different network elements to loads.
Example: At 55 seconds, set the fixed shunt out of service which is located at bus 200 and which has an ID of 3.
SET, FSHUNT=200#3, AT=55, STATUS=OUT
SET_DYRMODEL Command
Set dynamic model attached to a bus
SET_DYRMODEL, BUS=, [BUS=], DYRMODEL=, AT=, STATUS=
Sets the status of a dynamic model attached to a bus.
Arguments:
- SET_DYRMODEL
- BUS (
int): Bus number. - BUS (
int)[Optional]: Additional bus numbers. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - STATUS (
str): Status to set the dynamic model. Options:STATUS=IN: Dynamic model is set in service.STATUS=OUT: Dynamic model is taken out of service.
Example: At 5 seconds, set the dynamic model PPC out of service.
SET_DYRMODEL, BUS=100, DYRMODEL=PPC, AT=5, STATUS=OUT
Set dynamic model attached to a generator
SET_DYRMODEL, GEN=, [GEN=], DYRMODEL=, AT=, STATUS=
Sets the status of a dynamic model attached to a generator or FACTS device.
Arguments:
- SET_DYRMODEL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - STATUS (
str): Status to set the dynamic model. Options:STATUS=IN: Dynamic model is set in service.STATUS=OUT: Dynamic model is taken out of service.
Example: At 10 seconds, turn off the excitation system (an AC8B system) for the generator with ID 2 at bus 1500.
SET_DYRMODEL, GEN=1500#2, DYRMODEL=AC8B, AT=10, STATUS=OUT
Set dynamic model attached to a transformer
SET_DYRMODEL, TX=, [TX=], DYRMODEL=, AT=, STATUS=
Sets the status of a dynamic model attached to a 2 winding or 3 winding transformer.
Arguments:
- SET_DYRMODEL
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - STATUS (
str): Status to set the dynamic model. Options:STATUS=IN: Dynamic model is set in service.STATUS=OUT: Dynamic model is taken out of service.
Example: At 15 seconds, turn off the on-load tap changer model OLTC1T attached to the transformer with ID 1 between buses 1500 and 1505.
SET_DYRMODEL, TX=1500->1505#1, DYRMODEL=OLTC1T, AT=15, STATUS=OUT
Set dynamic model attached to a load
SET_DYRMODEL, LOAD=, DYRMODEL=, AT=, STATUS=
Sets the status of a dynamic model attached to a load.
Arguments:
- SET_DYRMODEL
- LOAD (
pas): Load definition. Loads are defined using the following syntax:bus#id. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - STATUS (
str): Status to set the dynamic model. Options:STATUS=IN: Dynamic model is set in service.STATUS=OUT: Dynamic model is taken out of service.
Example: At 15 seconds, turn off the induction motor load model CIMWBL attached to the load on bus 2576 with ID 1.
SET_DYRMODEL, LOAD=2576#1, DYRMODEL=CIMWBL, AT=15, STATUS=OUT
CONTROL Command
The gridmo Engine can control shunt Flexible AC Transmission System (FACTS) devices in PSSE as generators, to modify a FACTS device using gridmo, use the GEN=bus#name syntax as shown below.

Examples:
CONTROL, GEN=1001#STATCOM1, ... // Rest of command see below
Control CON
CONTROL, GEN/BUS/TX/MINS=, [GEN/BUS/TX/MINS=], DYRMODEL=, CON=, [VALSCALE=, VAL_FUNCTION=], AT=, VAL/RELVAL=
Controls one generator (or generator controller) by changing the specified Constant Parameter (CON).
Arguments:
- CONTROL
- GEN or BUS or TX or MINS:
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - BUS (
int): Bus number. - BUS (
pas)[Optional]: Additional bus numbers. - TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - MINS (
int): Miscellaneous (other) type model global model instance identifier. - MINS (
int)[Optional]: Additional miscellaneous (other) type model global model instance identifier.
- GEN (
- DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - CON (
str): Constant Parameter ID. Must includeJ+. CONs are zero-indexed and apply to the generator itself, not the location of the relevantCONin the PSS®ECONarray. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVALorRELVAL(i.e. new_value =VALxVALSCALEor new_value = old_value + (RELVALxVALSCALE)). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVALorRELVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. UseAT=-1to set the variable before dynamic model initialisation. - VAL or RELVAL:
- VAL 🔢 (
float): New value, expressed absolutely (i.e. new_value =VAL). - RELVAL 🔢 (
float): New value, expressed relatively (i.e. new_value = old_value +RELVAL).
- VAL 🔢 (
Example: At 2 seconds, change the machine parameters of the GENSAL (salient pole) generator at bus 100 which has an ID of 1. Change CON J+3 (H, machine inertia) to a new value of H=0.78 MWs/MVA.
CONTROL, GEN=100#1, DYRMODEL=GENSAL, CON=J+3, AT=2, VAL=0.78
Example: At 2 seconds, change the machine parameters of the GENSAL (salient pole) generator at bus 100 which has an ID of 1. Increase CON J+3 (H, machine inertia) by 0.1 MWs/MVA.
CONTROL, GEN=100#1, DYRMODEL=GENSAL, CON=J+3, AT=2, RELVAL=0.1
Control ICON
CONTROL, GEN/BUS/TX/MINS=, [GEN/BUS/TX/MINS=], DYRMODEL=, ICON=, [VALSCALE=, VAL_FUNCTION=], AT=, VAL/RELVAL=
Controls one generator (or generator controller) by changing the specified Integer Parameter (ICON).
Arguments:
- CONTROL
- GEN or BUS or TX or MINS:
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - BUS (
int): Bus number. - BUS (
pas)[Optional]: Additional bus numbers. - TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - MINS (
int): Miscellaneous (other) type model global model instance identifier. - MINS (
int)[Optional]: Additional miscellaneous (other) type model global model instance identifier.
- GEN (
- DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - ICON (
str): Integer Parameter (ICON) ID. Must includeM+. ICONs are zero-indexed and apply to the generator itself, not the location of the relevantICONin the PSS®EICONarray. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVALorRELVAL(i.e. new_value =VALxVALSCALEor new_value = old_value + (RELVALxVALSCALE)). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVALorRELVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. UseAT=-1to set the variable before dynamic model initialisation. - VAL or RELVAL:
- VAL (
int): New value, expressed absolutely (i.e. new_value =VAL). - RELVAL (
int): New value, expressed relatively (i.e. new_value = old_value +RELVAL).
- VAL (
Example: At 5 seconds, change the controller parameter of the WT4E2 wind generator controller at bus 200 with an ID of 1. Change ICON M+5 (PQ priority flag for current limit) to 1 for P priority.
CONTROL, GEN=200#1, DYRMODEL=WT4E2, ICON=M+5, AT=5, VAL=1
Control VAR
CONTROL, GEN/BUS/TX/MINS=, [GEN/BUS/TX/MINS=], DYRMODEL=, VAR=, [VALSCALE=, VAL_FUNCTION=], AT=, VAL/RELVAL=
Controls one generator (or generator controller) by changing the specified Algebraic Variable (VAR).
Arguments:
- CONTROL
- GEN or BUS or TX or MINS:
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - BUS (
int): Bus number. - BUS (
int)[Optional]: Additional bus numbers. - TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - MINS (
int): Miscellaneous (other) type model global model instance identifier. - MINS (
int)[Optional]: Additional miscellaneous (other) type model global model instance identifier.
- GEN (
- DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - VAR (
str): Algebraic Variable (VAR) ID. Must includeL+. VARs are zero-indexed and apply to the generator itself, not the location of the relevantVARin the PSS®EVARarray. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVALorRELVAL(i.e. new_value =VALxVALSCALEor new_value = old_value + (RELVALxVALSCALE)). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVALorRELVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. UseAT=-1to set the variable before dynamic model initialisation. - VAL or RELVAL:
- VAL 🔢 (
float): New value, expressed absolutely (i.e. new_value =VAL). - RELVAL 🔢 (
float): New value, expressed relatively (i.e. new_value = old_value +RELVAL).
- VAL 🔢 (
Some PSS®E dynamic models use VARs for internal calculations. Therefore, changing a VAR may not have the intended result as your new value may be overridden by the model's internal calculation on the next time step.
Example: At 10.7 seconds, change the controller parameter of the REPCBU1 "other" bus model (USRBUS) at bus 1500. Change VAR L+1 (QREF, reactive power reference) to 0.15 [p.u.] on controller base.
CONTROL, BUS=1500, DYRMODEL=REPCBU1, VAR=L+1, AT=10.7, VAL=0.15
Example: At 15 seconds, change the controller parameter of the REPCA1 "other" bus model at bus 1000. Increase VAR L+3 (Active power reference) by 0.1 [p.u.] on controller base.
CONTROL, BUS=1000, DYRMODEL=REPCA1, VAR=L+3, AT=15, RELVAL=0.1
Control Governor Reference (GREF)
CONTROL_GREF, GEN=, [GEN=], [VALSCALE=, VAL_FUNCTION=], AT=, VAL/RELVAL=
Controls one generator (or generator controller) by changing the governor (speed) reference.
Arguments:
- CONTROL_GREF
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVALorRELVAL(i.e. new_value =VALxVALSCALEor new_value = old_value + (RELVALxVALSCALE)). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVALorRELVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - VAL or RELVAL:
- VAL 🔢 (
float): New value, expressed absolutely (i.e. new_value =VAL). - RELVAL 🔢 (
float): New value, expressed relatively (i.e. new_value = old_value +RELVAL).
- VAL 🔢 (
Example: At 5 seconds, change the governor reference of the generator model at bus 500 with an ID of 2. Change GREF (governor speed deviation) to 0.02 [p.u.].
CONTROL_GREF, GEN=500#2, AT=5, VAL=0.02
Example: At 5 seconds, change the governor reference of the generator model at bus 500 with an ID of 2. Change GREF (governor speed deviation) by +0.02 [p.u.] relative to the current GREF value.
CONTROL_GREF, GEN=500#2, AT=5, RELVAL=0.02
Control Voltage Reference (VREF)
CONTROL_VREF, GEN=, [GEN=], [VALSCALE=, VAL_FUNCTION=], AT=, VAL/RELVAL=
Controls one generator (or generator controller) by changing the voltage reference.
Arguments:
- CONTROL_VREF
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVALorRELVAL(i.e. new_value =VALxVALSCALEor new_value = old_value + (RELVALxVALSCALE)). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVALorRELVAL. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - VAL or RELVAL:
- VAL 🔢 (
float): New value, expressed absolutely (i.e. new_value =VAL). - RELVAL 🔢 (
float): New value, expressed relatively (i.e. new_value = old_value +RELVAL).
- VAL 🔢 (
Example: At 5 seconds, change the voltage reference of the generator model at bus 500 with an ID of 2. Change VREF (voltage reference) to 1.01 [p.u.].
CONTROL_VREF, GEN=500#2, AT=5, VAL=1.01
Example: At 5 seconds, change the voltage reference of the generator model at bus 500 with an ID of 2. Change VREF (voltage reference) by +0.04 [p.u.] relative to the current VREF value.
CONTROL_VREF, GEN=500#2, AT=5, RELVAL=0.04
SIMPLEFAULT Command
SIMPLEFAULT, LINE=, AT=, DURATION=, [FZ=0, XR=3]
Applies a simple three phase fault at a line. The line remains in-service during and after the fault is cleared. Fault impedance can be specified in ohms or residual voltage (for SMIB studies).
SIMPLEFAULT is typically used in SMIB studies for simpler fault-related performance studies. For more realistic fault scenarios, as required in wide area network studies, we recommend using the ADVFAULT Command.
Arguments:
- SIMPLEFAULT
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - AT 🔢 (
float): Time at which the fault is applied during the dynamic simulation [s]. - DURATION 🔢 (
float): Fault duration [ms]. When the duration has expired, the fault is removed and the line will remain in service. - TYPE (
str)[Optional]: Fault type. Defaults to3PH. Options:TYPE=3PH: Three phase fault.TYPE=2PHG: Two phase to ground fault ('AB' to ground fault).TYPE=PHPH: Phase to phase fault ('A' to 'B' fault).TYPE=PHG: Phase to ground fault ('A' to ground fault).
- FZ [Optional]: Fault impedance. Default value is 0 Ω (i.e. bolted fault). There are two methods for specifying the fault:
- Fault impedance 🔢 (
float): Fault impedance [Ω] (e.g.0.2). - Residual voltage (
str): Residual voltage [%] (e.g. 20%). The percentage is relative to the nominal voltage. This method is used in SMIB studies.
- Fault impedance 🔢 (
- XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the fault. Default value is 3.
PSS®E only natively supports three phase (3PH) faults. Three phase to ground (3PHG) are not natively supported.
Example:
- At 5 seconds, apply a three phase fault at the connection point bus of the SMIB model (where the
frombus 500 is the connection point and thetobus 999 is the slack bus). - Fault duration is 430 ms.
- Fault impedance is
Zf=Zs(meaning 50% residual voltage). - X/R ratio of the fault is 3.
SIMPLEFAULT, LINE=500->999#1, AT=5, DURATION=430, FZ=50%
MULTIFAULT Command
MULTIFAULT, LINE=, AT=, TYPE=, SEQ=, [XR=3, MIN_TIME_BETWEEN_FAULTS=0]
Applies a pre-defined multiple fault sequence in one Command. The first fault is at AT= seconds. Fault X/R ratio and fault distance percentage can also optionally be provided.
MULTIFAULT is typically used in SMIB studies for simple one-Command multiple-fault ride-through (MFRT) studies. For more realistic fault scenarios, as required in wide area network studies, we recommend using the ADVFAULT Command.
Arguments:
- MULTIFAULT
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - AT 🔢 (
float): Time at which the first fault in the sequence is applied during the dynamic simulation [s]. - TYPE (
str): Type of multiple fault ride through to apply. Options:TYPE=AEMODMAT: AEMO Dynamic Model Acceptance Tests style MFRT tests.
- SEQ (
str): Type of pre-defined multi fault sequence to apply. Options:- If
TYPE=AEMODMAT:SEQ=Px: Wherexis an integer of 1 to 10.Psequence faults are AEMO DMAT balanced MFRT tests. See below for details.SEQ=Sx: Wherexis an integer of 1 to 10.Ssequence faults are AEMO DMAT unbalanced MFRT tests. See below for details.
- If
- XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the fault. Default value is 3. - MIN_TIME_BETWEEN_FAULTS 🔢 (
float)[Optional]: Minimum time between faults in the sequence [s]. Default value is 0 [s].
PSS®E only natively supports three phase (3PH) faults. Three phase to ground (3PHG) are not natively supported.
- SEQ=P1
- P2
- P3
- P4
- P5
- P6
- P7
- P8
- P9
- P10
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=, SEQ=P1 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=7.43, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=12.65, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=12.97, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=13.59, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=15.21, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=17.33, DURATION=430, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=17.95, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=18.18, DURATION=220, FZ=16.6%
SIMPLEFAULT, LINE=<line>, AT=18.41, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=18.83, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=22.05, DURATION=120, FZ=16.6%
SIMPLEFAULT, LINE=<line>, AT=32.27, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=33.39, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=40.51, DURATION=220, FZ=16.6%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P2 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=7.12, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=7.84, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=7.97, DURATION=120, FZ=16.6%
SIMPLEFAULT, LINE=<line>, AT=13.19, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=14.41, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=14.73, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=14.96, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=25.08, DURATION=430, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=32.20, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=33.07, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=36.50, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=38.12, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=40.24, DURATION=220, FZ=66.66%
SIMPLEFAULT, LINE=<line>, AT=40.66, DURATION=120, FZ=50%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P3 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=5.13, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=7.25, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=10.37, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=20.49, DURATION=430, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=22.92, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=23.64, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=25.36, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=26.48, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=27.20, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=27.52, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=34.74, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=34.97, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=35.84, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=41.06, DURATION=120, FZ=16.66%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P4 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=7.12, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=10.24, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=10.96, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=21.18, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=28.40, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=28.63, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=29.85, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=29.98, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=30.70, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=32.32, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=32.64, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=32.96, DURATION=430, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=35.39, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=40.51, DURATION=120, FZ=0%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P5 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=5.23, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=5.95, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=9.07, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=9.20, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=10.07, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=17.19, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=19.41, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=19.73, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=29.85, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=31.97, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=32.69, DURATION=430, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=33.32, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=34.94, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=40.16, DURATION=220, FZ=16.66%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P6 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=5.32, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=5.45, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=12.57, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=14.79, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=14.92, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=15.54, DURATION=430, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=25.97, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=26.94, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=30.06, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=31.28, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=31.60, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=32.22, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=34.44, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=36.16, DURATION=220, FZ=77.7%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P7 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=6.62, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=6.94, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=7.56, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=8.43, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=8.75, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=8.98, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=11.20, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=14.42, DURATION=430, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=19.85, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=21.07, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=23.19, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=30.31, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=40.43, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=41.15, DURATION=220, FZ=16.66%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P8 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=10.12, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=10.74, DURATION=430, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=12.17, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=15.29, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=17.51, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=17.74, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=27.96, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=28.09, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=35.31, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=35.63, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=36.05, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=38.17, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=39.04, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=40.66, DURATION=220, FZ=50%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P9 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=12.12, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=13.09, DURATION=220, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=13.51, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=16.63, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=17.25, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=19.37, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=24.59, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=24.72, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=25.04, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=26.66, DURATION=430, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=28.09, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=30.31, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=40.53, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=41.25, DURATION=120, FZ=66.6%
MULTIFAULT, TYPE=AEMODMAT, LINE=<line>, AT=5, SEQ=P10 converts to:
SIMPLEFAULT, LINE=<line>, AT=5.00, DURATION=220, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=5.23, DURATION=120, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=6.35, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=9.57, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=14.69, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=21.91, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=22.04, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=22.36, DURATION=220, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=24.08, DURATION=120, FZ=77.7%
SIMPLEFAULT, LINE=<line>, AT=24.95, DURATION=120, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=25.57, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=35.79, DURATION=430, FZ=66.6%
SIMPLEFAULT, LINE=<line>, AT=38.22, DURATION=220, FZ=16.66%
SIMPLEFAULT, LINE=<line>, AT=38.94, DURATION=120, FZ=50%
SIMPLEFAULT, LINE=<line>, AT=39.26, DURATION=120, FZ=50%
- SEQ=S1
- S2
- S3
- S4
- S5
- S6
- S7
- S8
- S9
- S10
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S1 converts to
SIMPLEFAULT, LINE=<line>, AT=10.00, TYPE=3PH, DURATION=100, FZ=20%
SIMPLEFAULT, LINE=<line>, AT=10.25, TYPE=3PH, DURATION=100, FZ=20%
SIMPLEFAULT, LINE=<line>, AT=10.50, TYPE=3PH, DURATION=100, FZ=20%
SIMPLEFAULT, LINE=<line>, AT=13.00, TYPE=2PHG, DURATION=100, FZ=20%
SIMPLEFAULT, LINE=<line>, AT=16.00, TYPE=2PHG, DURATION=100, FZ=20%
SIMPLEFAULT, LINE=<line>, AT=18.00, TYPE=2PHG, DURATION=100, FZ=20%
AEMO requires Sequence S1 to contain 6 specific faults and Sequences S2 - S5 to contain 15 randomly generated faults. Refer to the AEMO DMAT requirements for details. For the S1 faults, we have assumed that "Sequence S1 includes application of a 3PHG fault at 5, 5.25, 5.5 seconds..." means that the first fault should be applied 5 seconsds after the typical 5 seconds reserved for allowing the model to initialise (i.e. the first fault is applied AT=10).
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S2 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=7.12, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=8.74, TYPE=2PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=9.06, TYPE=3PH, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=19.18, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=19.50, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=21.72, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=21.95, TYPE=2PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=22.57, TYPE=3PH, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=29.69, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=34.91, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=35.84, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=37.06, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=37.93, TYPE=PHG, DURATION=220, FZ=2%
SIMPLEFAULT, LINE=<line>, AT=38.16, TYPE=PHG, DURATION=120, FZ=66%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S3 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=6.62, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=7.24, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=7.56, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=8.28, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=13.40, TYPE=PHG, DURATION=430, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=16.83, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=26.95, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=29.17, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=30.14, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=30.56, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=32.68, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=32.81, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=33.04, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=34.16, TYPE=PHG, DURATION=220, FZ=0%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S4 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=12.22, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=12.54, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=14.16, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=16.38, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=17.35, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=18.07, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=23.19, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=23.32, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=24.04, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=27.26, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=28.38, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=28.70, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=28.83, TYPE=PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=31.26, TYPE=PHG, DURATION=120, FZ=0%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S5 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=12.22, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=12.35, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=12.58, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=22.70, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=23.57, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=23.89, TYPE=PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=26.01, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=29.13, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=30.75, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=35.97, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=37.19, TYPE=2PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=38.12, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=38.54, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=40.76, TYPE=PHG, DURATION=120, FZ=75%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S6 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=7.22, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=7.35, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=17.57, TYPE=2PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=18.29, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=25.41, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=27.53, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=28.65, TYPE=3PH, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=33.77, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=36.99, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=37.86, TYPE=PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=38.49, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=38.81, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=39.43, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=39.66, TYPE=2PHG, DURATION=220, FZ=75%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S7 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=7.22, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=7.84, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=8.46, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=9.43, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=9.56, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=10.78, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=12.50, TYPE=2PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=12.94, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=13.26, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=13.58, TYPE=3PH, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=18.80, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=25.92, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=36.04, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=39.26, TYPE=2PHG, DURATION=120, FZ=0%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S8 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=5.13, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=6.85, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=8.97, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=9.69, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=12.81, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=19.93, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=20.80, TYPE=2PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=26.02, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=26.15, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=26.57, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=26.99, TYPE=PHG, DURATION=430, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=37.42, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=38.04, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=40.16, TYPE=PHG, DURATION=220, FZ=75%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S9 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=15.12, TYPE=3PH, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=18.24, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=19.21, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=19.53, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=21.65, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=22.77, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=23.19, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=23.42, TYPE=PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=23.65, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=25.77, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=27.49, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=28.11, TYPE=2PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=35.33, TYPE=2PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=40.45, TYPE=2PHG, DURATION=430, FZ=0%
MULTIFAULT, AT=5, TYPE=AEMODMAT, LINE=<line>, SEQ=S10 converts to
SIMPLEFAULT, LINE=<line>, AT=5.00, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=7.12, TYPE=PHG, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=8.74, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=11.86, TYPE=3PH, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=12.09, TYPE=PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=12.96, TYPE=PHG, DURATION=430, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=20.39, TYPE=3PH, DURATION=120, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=21.01, TYPE=2PHG, DURATION=220, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=21.43, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=21.66, TYPE=2PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=26.88, TYPE=PHG, DURATION=220, FZ=75%
SIMPLEFAULT, LINE=<line>, AT=37.10, TYPE=PHG, DURATION=220, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=37.82, TYPE=2PHG, DURATION=120, FZ=66%
SIMPLEFAULT, LINE=<line>, AT=38.94, TYPE=2PHG, DURATION=120, FZ=0%
SIMPLEFAULT, LINE=<line>, AT=41.06, TYPE=PHG, DURATION=120, FZ=0%
Example:
- At 5 seconds, apply the AEMO DMAT MFRT sequnce P6 based on the above definition. Apply to line
500->999#1
MULTIFAULT, LINE=500->999#1, TYPE=AEMODMAT, AT=5, SEQ=P6
BUS_FAULT Command
BUS_FAULT, AT=, BUS=, FAULT=[TYPE=, FZ=0, XR=0], DURATION=/PROTECTION=[...]
Applies a fault on a bus. The fault can be either:
- A temporary fault where protection systems don't operate and no assets are disconnected.
- A fault where protection systems operate and assets are disconnected.
Arguments:
- BUS_FAULT
- AT 🔢 (
float): Time at which the fault is applied during the dynamic simulation [s]. - BUS (
int): Bus number. - FAULT (
object): Fault definition with parameters which are all common to the fault being applied, all inside the same square bracket[...]:- TYPE (
str): Fault type to apply. Options:TYPE=3PH: Three phase fault.TYPE=2PHG: Two phase to ground fault.TYPE=PHPH: Phase to phase fault.TYPE=PHG: Phase to ground fault.
- FZ 🔢 (
float)[Optional]: Fault impedance [Ω]. Default value is 0 Ω (i.e. bolted fault). - XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the fault. Default value is 0 (pure resistive fault).
- TYPE (
- DURATION or PROTECTION:
- DURATION 🔢 (
float): Fault duration [s]. When the duration has expired, the fault is removed without disconnecting any assets. - PROTECTION (
object): Protection definition with parameters which are all common to the protection scheme, all inside the same square bracket[...]:- TRIP_TIME 🔢 (
float): Circuit breaker(s) trip time [s]. When the time is reached, the fault is cleared by disconnecting this bus and assets connected to the bus.
- TRIP_TIME 🔢 (
- DURATION 🔢 (
PSS®E only natively supports three phase (3PH) faults. Three phase to ground (3PHG) are not natively supported.
Examples
- Transient fault on bus without disconnecting assets
- At 5 seconds, apply a transient three phase fault to the bus
12875in the PSSE model. - The fault clears after 150 ms and no assets are disconnected.
BUS_FAULT, AT=5, BUS=12875, FAULT=[TYPE=3PH], DURATION=0.15
- Fault on a bus, resulting in bus disconnecting
- At 5 seconds, apply a three phase fault to the bus
12875in the PSSE model. - The fault clears after 150 ms and disconnects the bus.
BUS_FAULT, AT=5, BUS=12875, FAULT=[TYPE=3PH], PROTECTION=[TRIP_TIME=0.15]
- Unbalanced fault with impedance on a bus, resulting in bus disconnecting
- At 5 seconds, apply a 10 ohm resistive phase to ground fault on bus
12875in the PSSE model. - The fault clears after 150 ms and disconnects the bus.
BUS_FAULT, AT=5, BUS=12875, FAULT=[TYPE=PHG, FZ=10], PROTECTION=[TRIP_TIME=0.15]
- Unbalanced bus fault, with specific impedance, resulting in bus disconnecting
- At 5 seconds, apply a single phase fault of 6+8j ohms impedance on bus
12875in the PSSE model. - The fault clears after 150 ms and disconnects the bus.
BUS_FAULT, AT=5, BUS=12875, FAULT=[TYPE=PHG, FZ=10, XR=8/6], PROTECTION=[TRIP_TIME=0.15]
LINE_FAULT Command
LINE_FAULT, AT=, LINE=, FAULT=[LOCATION=, TYPE=, FZ=0, XR=0], DURATION=/PROTECTION=[...], AUTO_RECLOSE=[...]
Applies a fault at a specified location on a line. The fault can be either:
- A temporary fault where protection systems don't operate and no assets are disconnected.
- A fault where protection systems operate and assets are disconnected with optional auto reclose logic.
Arguments:
- LINE_FAULT
- AT 🔢 (
float): Time at which the fault is applied during the dynamic simulation [s]. - LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - FAULT (
object): Fault definition with parameters which are all common to the fault being applied, all inside the same square bracket[...]:- LOCATION (
float%): The distance of the fault from thefrombus to thetobus [%] (i.e.10%specifies a fault located close to thefrombus). - TYPE (
str): Fault type to apply. Options:TYPE=3PH: Three phase fault.TYPE=2PHG: Two phase to ground fault.TYPE=PHPH: Phase to phase fault.TYPE=PHG: Phase to ground fault.
- FZ 🔢 (
float)[Optional]: Fault impedance [Ω]. Default value is 0 Ω (i.e. bolted fault). - XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the fault. Default value is 0 (pure resistive fault).
- LOCATION (
- DURATION or PROTECTION:
- DURATION 🔢 (
float): Fault duration [s]. When the duration has expired, the fault is removed without disconnecting any assets. - PROTECTION (
object): Protection definition with parameters which are all common to the protection scheme, all inside the same square bracket[...]:- TRIP_TIME1 🔢 (
float): Clearance time of the circuit breaker(s) on thefromend of the line [s]. When the time is reached, the fault is cleared by disconnecting the line section between the fault location and thefrombus. - TRIP_TIME2 🔢 (
float): Clearance time of the circuit breaker(s) on thetoend of the line [s]. When the time is reached, the fault is cleared by disconnecting the line section between the fault location and thetobus.
- TRIP_TIME1 🔢 (
- DURATION 🔢 (
- AUTO_RECLOSE (
object)[Optional]: Optional definition with parameters which are all common to the auto reclose logic for this line, all inside the same square bracket[...]. Can only be used ifPROTECTION=is used. Defaults to no auto reclose logic.- ATTEMPTS (
int): The number of auto reclose attempts. Must be1or greater. - DEAD_TIME 🔢 (
float): The time delay each circuit breaker waits after tripping before attempting to reclose the line [s]. - FINAL_STATUS (
str): Final status of the line after all reclose attempts. Options:FINAL_STATUS=IN: The line is in service after the final auto reclose attempt.FINAL_STATUS=OUT: The line is out of service after the final auto reclose attempt.
- ATTEMPT_BUS (
int,str): Determines which side(s) of the line close first during a reclose attempt. Options:ATTEMPT_BUS=x(int): The line section from the bus with numberx(eitherfromorto) to the fault location will attempt to reclose first. The other end will only reclose if the line section from busxto the fault location is in service (the other end is assumed to have a dead-line blocking element); orATTEMPT_BUS=BOTH: Both ends of the line will auto reclose together (synchronised) and subsequent faults will appear the same as the original fault. This may result in repeated fault applications, which is uncommon in real-world fault scenarios.
- TRIP_DELAY_AFTER_RECLOSE 🔢(
float)[Optional]: An optional time delay before re-tripping after a close onto fault as part of a reclose attempt [s]. Used for lines with extremely fast clearance times where an additional mechanical close-to-trip time needs to be considered for reclose attempts (e.g. subsequent trips are slower than the initial trip). Defaults to0[s].
- ATTEMPTS (
PSS®E only natively supports three phase (3PH) faults. Three phase to ground (3PHG) are not natively supported.
Examples
- Transient fault on line
- At 5 seconds, apply a transient three phase fault to the line between buses
1000and2000with id1. - The fault occurs very close to bus
1000(approximately 10% of the line length, starting at bus1000). - The fault clears after 150 ms and no assets are disconnected.
LINE_FAULT, AT=5, LINE=1000->2000#1, FAULT=[LOCATION=10%, TYPE=3PH], DURATION=0.15
- Fault on a line, cleared with no auto reclose
- At 5 seconds, apply a transient three phase fault to the line between buses
1000and2000with id1. - The fault occurs at the midpoint of the line between the two buses.
- No auto reclose is configured for the line protection.
- The line trips and remains out of service at both ends after 250 ms.
LINE_FAULT, AT=5, LINE=1000->2000#1, FAULT=[LOCATION=50%, TYPE=3PH], PROTECTION=[TRIP_TIME1=0.25, TRIP_TIME2=0.25]
- Bolted fault on transmission line with different clearance times and auto reclose
- At 5 seconds, apply a transient three phase fault to the line between buses
1000and2000with id1. - The fault occurs close to bus
2000, within the zone 1 pickup of the distance protection from bus2000(trip within 120 ms). - The fault is within the zone 2 pickup of the distance protection from bus
1000(trip within 220 ms). - Both line protection elements are configured with independent three-phase auto reclose functions, with 1 attempt after a 5 second wait.
- The bus
1000line end is configured to close first, with the far end waiting for an energised line before closing. - The fault was transient and the line is successfully returned to service after the reclose attempt.
LINE_FAULT, AT=5, LINE=1000->2000#1, FAULT=[LOCATION=90%, TYPE=3PH], PROTECTION=[TRIP_TIME1=0.22, TRIP_TIME2=0.12], AUTO_RECLOSE=[ATTEMPTS=1, DEAD_TIME=5, FINAL_STATUS=IN, ATTEMPT_BUS=1000]
- Single phase fault on a transmission line, with multiple reclose attempts before lockout
- At 5 seconds, apply a transient single phase to earth fault of Z=6+8j ohms on the line between buses
1000and2000with id1. - The fault occurs close to bus
2000, within the zone 1 pickup of the distance protection from bus2000(trip within 120 ms). - The fault is within the zone 2 pickup of the distance protection from bus
1000(trip within 220 ms). - Both line protection elements are configured with independent three-phase auto reclose functions, with 2 attempts, each after a 5 second wait.
- The bus
1000line end is configured to close first, with the far end waiting for an energised line before closing (dead-line blocking) - The fault is actually a downed conductor, so the line locks out on all three phases after 2 failed attempts to close.
LINE_FAULT, AT=5, LINE=1000->2000#1, FAULT=[LOCATION=90%, TYPE=PHG, FZ=10, XR=8/6], PROTECTION=[TRIP_TIME1=0.22, TRIP_TIME2=0.12], AUTO_RECLOSE=[ATTEMPTS=2, DEAD_TIME=5, FINAL_STATUS=OUT, ATTEMPT_BUS=1000]
VDISTURBANCE Command
VDISTURBANCE, LINE=, [OP=VDIVIDER/COMPENSATED], AT=, DURATION=, VCHANGEPU/VPU=, [XR=3]
At AT= seconds after the start of the dynamic simulation, applies a voltage disturbance at the from bus of the LINE=from->to#id. Depending on the values of VCHANGEPU/VPU, OP and the connection point bus voltage prior to the disturbance, the Command automatically switches between:
- Applying a 3PH fault to create an undervoltage disturbance; or
- Inserting a capacitor to create an overvoltage disturbance.
The disturbance is removed after DURATION= milliseconds.
VDISTURBANCE is only for single machine infinite bus (SMIB) studies. The LINE=from->to#id Argument should be specified where the from bus is the generator point of connection and the to bus is the infinite source.
Arguments:
- VDISTURBANCE
- LINE 🔢 (
float): Line definition of the Thévenin equivalent impedance. Lines are defined using the following syntax: from->to#id. - OP (
str)[Optional]: Calculation methodology. Defaults toOP=VDIVIDER. Options:OP=VDIVIDER: Voltage divider calculation methodology.OP=COMPENSATED: Voltage divider calculation methodology extended to consider generating system contribution prior to voltage disturbances.
- AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - DURATION 🔢 (
float): Disturbance duration [ms]. When the duration has expired, the disturbance is removed. - VCHANGEPU or VPU:
- VCHANGEPU 🔢 (
float): Relative voltage disturbance [p.u.]. The voltage is relative to thefrombus voltage of theLINE=from->to#idprior to the disturbance. - VPU 🔢 (
float): Absolute voltage disturbance [p.u.].
- VCHANGEPU 🔢 (
- XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the 3PH fault impedance used for undervoltages. Default value is 3. When inserting a capacitor for overvoltage disturbances, XR is ignored.
Multiple VDISTURBANCE Commands are supported in a single Node, which may include a mix of under and over voltage disturbances. To enable this functionality, distance factor is fixed at 1 (i.e. all disturbances are applied at the connection point).
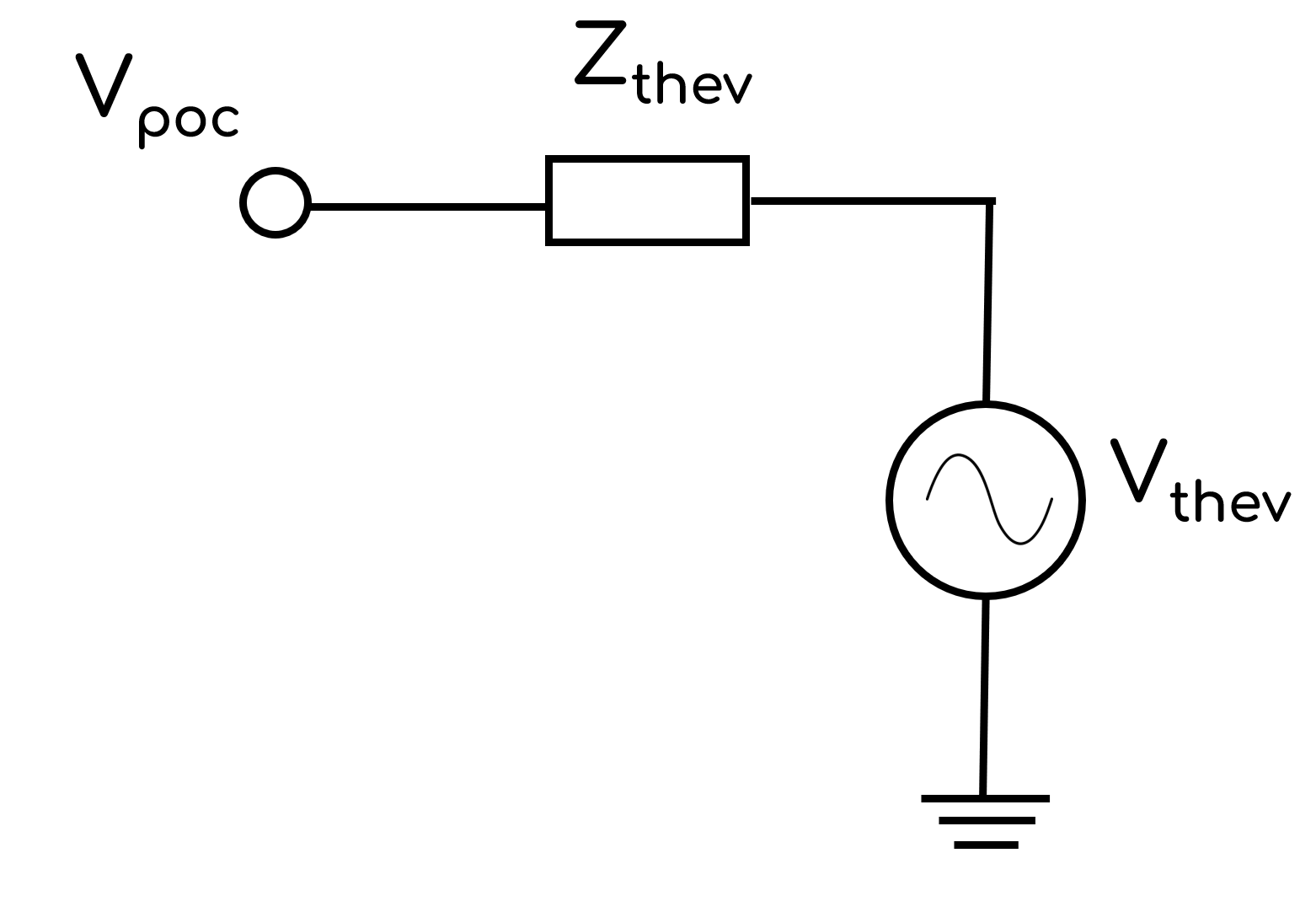
Calculation methodology
The image below shows a Thévenin equivalent of the grid as used in SMIB studies, commonly referred to as the 'infinite source', whereby:
- Vthev: Thévenin equivalent voltage source.
- Zthev: Thévenin equivalent impedance.
- Vpoc: Connection point voltage prior to any disturbance.
The VDISTURBANCE Command introduces a fault impedance, Zf, in order to achieve a desired voltage disturbance as specified by VCHANGEPU or VPU. There are two calculation methodologies used to calculate Zf:
OP=VDIVIDER; andOP=COMPENSATED.
- OP=VDIVIDER
- OP=COMPENSATED
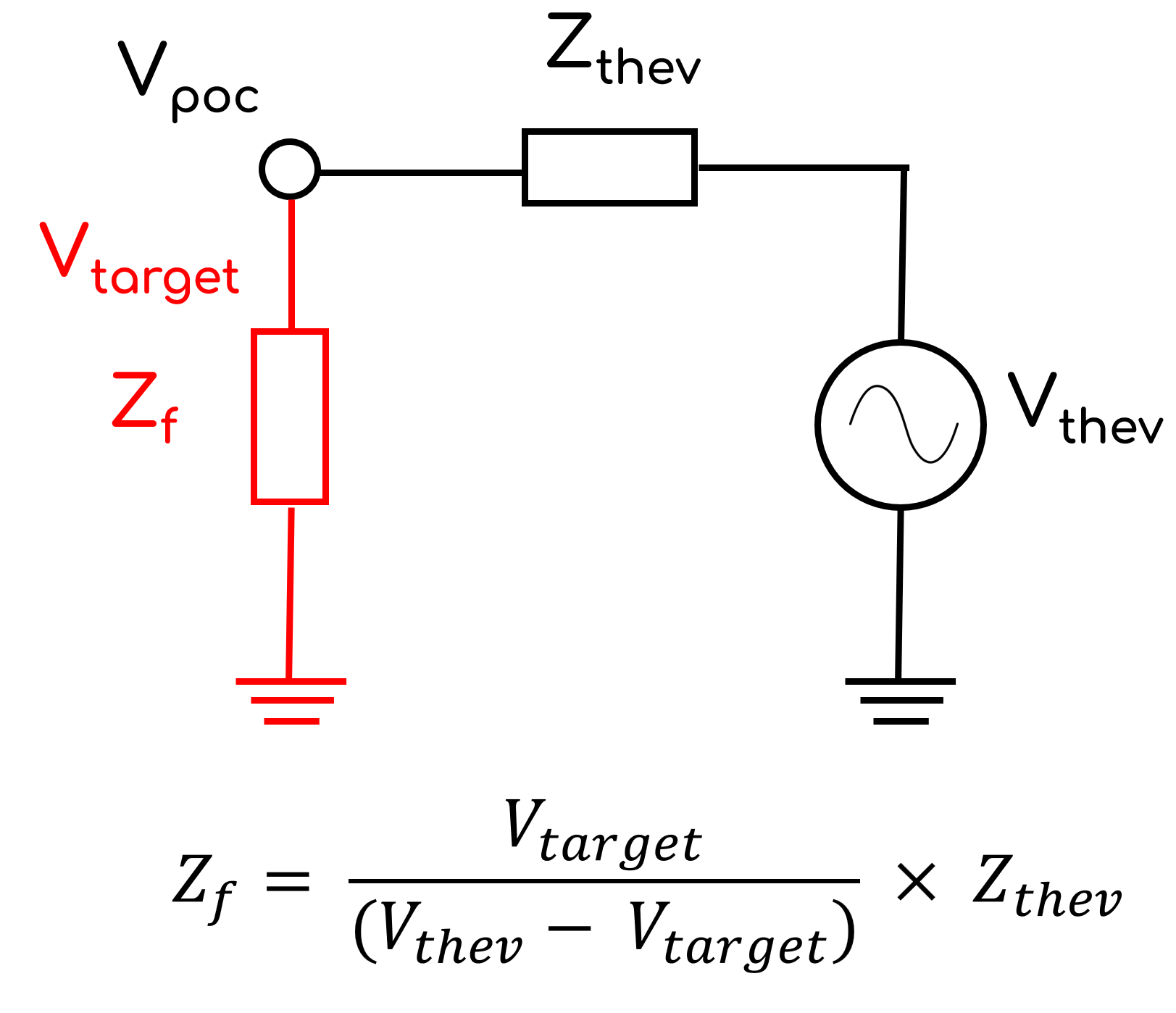
Zf is calculated using voltage divider circuit theory. The formula assumes that the generating system current contribution prior to the disturbance is ≈ 0 (i.e. Vpoc ≈ Vthev) and the generating system current contribution during the disturbance is ≈ 0.
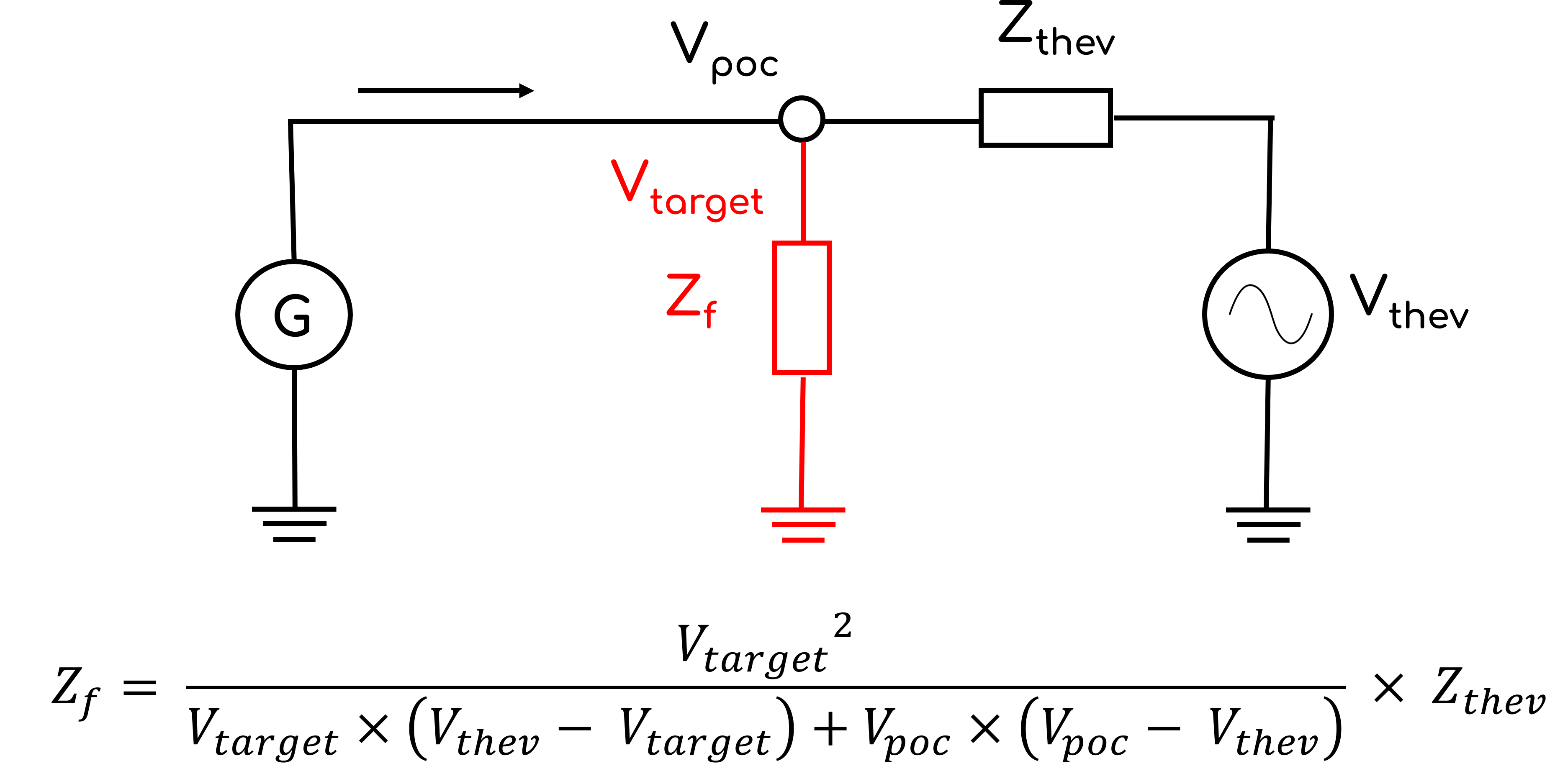
Zf is calculated using an extension of the voltage divider circuit theory which consider generating system contribution prior to voltage disturbances. The formula assumes that the generating system current contribution during the disturbance is the same as prior to the disturbance. This methodology is useful when studying generating systems that have a very low SCR and therefore the assumption of Vpoc ≈ Vthev is no longer valid. Consider the example where a generating system is at PmaxQmax with a low SCR and therefore Vthev = 1.2 [p.u.] to achieve Vpoc = 1.0 [p.u.]. If the user requires a voltage disturbance of 1.2 [p.u.] (i.e. Vtarget = 1.2 [p.u.]), using simple voltage divider circuit theory Zthev would be equal to ∞ and no disturbance would be created!
Example: At 5 seconds, apply a 430 ms voltage disturbance at the connection point which is located at bus 200. The voltage disturbance should cause a -0.1 p.u. relative change in the connection point voltage by applying a 3PH fault. The fault impedance should be calculated using the Thévenin equivalent source impedance of line 200->300#1.
VDISTURBANCE, LINE=200->300#1, AT=5, DURATION=430, VCHANGEPU=-0.1
At 5 seconds, apply a 500 ms voltage disturbance at the connection point which is located at bus 200. The voltage disturbance should target 1.2 p.u. at the connection point voltage by switching in a capacitor. The capacitance should be calculated using the Thévenin equivalent source impedance of line 200->300#1.
VDISTURBANCE, LINE=200->300#1, AT=5, DURATION=500, VPU=1.2
At 5 seconds, apply a 500 ms voltage disturbance at the connection point which is located at bus 200. The voltage disturbance should target 1.2 p.u. at the connection point voltage by switching in a capacitor. The capacitance should be calculated using the Thévenin equivalent source impedance of line 200->300#1. At 10 seconds, once the previous disturbance has cleared, apply another 500 ms voltage disturbance at the connection point which is located at bus 200. The voltage disturbance should target 0.35 p.u. at the connection point voltage by applying a 3PH fault. The fault impedance should be calculated using the Thévenin equivalent source impedance of line 200->300#1.
VDISTURBANCE, LINE=200->300#1, AT=5, DURATION=500, VPU=1.2
VDISTURBANCE, LINE=200->300#1, AT=10, DURATION=500, VPU=0.35
SCALE_LOADS Command
SCALE_LOADS, CHANGE=, [AREA=ALL], AT=
At AT= seconds after the start of the dynamic simulation, scales all loads (excluding motor loads e.g. ignores all generator models absorbing real power) by a factor of CHANGE=.
Arguments:
- SCALE_LOADS
- CHANGE: How to change the loads in the loaded model. There are two methods for specifying the fault:
- Absolute value 🔢 (
float): Reduce all loads equally by a fixed factor, such asCHANGE = -500meaning reduce by500MW. - Relative value (
float%): Apply a percentage scale to all loads equally. For example, to reduce all loads by20%setCHANGE = -20%.
- Absolute value 🔢 (
- AREA 🔢 (
floatorALL)[Optional]: PSS®E area to apply the load scaling to. Default value isALL. Options:AREA=ALL: Apply the load scaling to all areas (all loads in the model).AREA=x: Apply the load scaling to areaxwherexis anint(will only apply scaling to loads which have the same area property as the specified areax).
- AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s].
Prior to gridmo v1.7.4 - the AREA= argument was incorrectly called SUBSYSTEM=.
The argument name has been corrected to AREA=. The SUBSYSTEM= argument is still accepted, but is treated as AREA= (and a warning is raised saying this argument is no longer supported.)
Example:
Reduce all loads which are labelled as being part of area 1 in the loaded PSS®E model by 15% at 5 seconds.
SCALE_LOADS, CHANGE=-15%, AREA=1, AT=5
Increase all loads in the loaded PSS®E model by 100 MW (spread evenly across all in service loads) at 5 seconds.
SCALE_LOADS, CHANGE=100, AT=5
SCALE_TX Command
SCALE_TX, [TX=], CHANGE=, AT=
At AT= seconds after the start of the dynamic simulation, applies an absolute or relative scaling factor to one or more transformers. Typically used to simulate a variable number of aggregated transformers.
Arguments:
- SCALE_TX
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - TX (
pas)[Optional]: Additional transformer definition(s). - CHANGE: How to scale the specified transformers. Options:
- Absolute value 🔢 (
float): Reduce/increase the specified transformers equally by a fixed factor, such asCHANGE = -2meaning reduce each transformer's base value by2MVA. - Relative value (
float%): Apply a percentage scale to each transformer specified, such asCHANGE = -20%meaning reduce each transformer's base value by20%.
- Absolute value 🔢 (
- AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s].
For three winding transformers, the CHANGE= specified is applied to each winding.
Example: The transformer between buses 1225 and 1226 with ID 1 represents an aggregatation of 25 equivalent transformers as part of a SMIB model. At 5 seconds after the start of the dynamic simulation, scale the transformer so it represents only a single aggregated transformer (for benchmarking purposes with site commissioning data).
SCALE_TX, TX=1225->1226#1, CHANGE=-96%, AT=5 // 1/25 = 0.04, so scale down by 96% to turn 25 transformers into 1
OUTPUT Command
By default when completing SMIB studies, the Thevenin equivalent voltage source and impedance should not be used for POC metering in OUTPUT Commands or in generating system dynamics model data file (i.e. .dyr files). This is for two reasons:
- SMIB studies: During certain SMIB events (e.g. faults, consideration of distance factor, voltage phase angle playback), there will be fictitious Thevenin equivalent source contribution or we will need to break the Thevenin equivalent impedance line into multiple parts to complete the event. See the image below considering the example of applying a fault using
SIMPLEFAULT; and - Network studies: When your generating system is merged into a network model, the Thevenin equivalent voltage source and impedance will no longer be present and therefore can't be referenced.
For clarity:
- ✅ Example of recommended POC metering:
OUTPUT, BUS=1000, VAL=V, NAME=i_poc_vOUTPUT, TX=1002->1000#1, METERBUS=1000, VAL=P, NAME=i_ch_poc_pOUTPUT, TX=1002->1000#1, METERBUS=1000, VAL=Q, NAME=i_ch_poc_q
- ❌ Example of incorrect POC metering:
OUTPUT, BUS=999, VAL=V, NAME=i_poc_vOUTPUT, LINE=1000->999#1, VAL=P, NAME=i_ch_poc_pOUTPUT, LINE=1000->999#1, VAL=Q, NAME=i_ch_poc_q
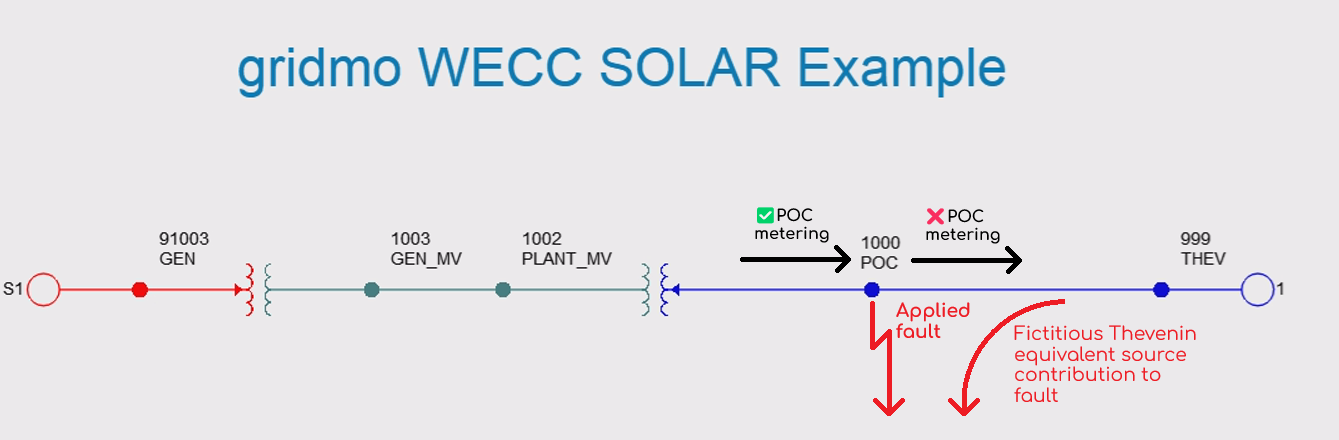
Output bus variable
OUTPUT, BUS=, VAL=, [VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a variable from a bus.
Arguments:
- OUTPUT
- BUS (
int): Bus number. - VAL (
str): Bus value. Options:VAL=V: Voltage [p.u.].VAL=F: Frequency [Hz].VAL=ANGLE: Angle [degrees]. Angle is relative to the generator which was specified as the slack generator prior to the start of the dynamic simulation.
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output =VALxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - PROCESS (
str)[Optional]:- If
VAL=ANGLE:PROCESS=ANGLE_WRAP: Post process the output angle to wrap between -180° to 180°. This can improve benchmarking between PSS®E and other software packages. Default value is no wrapping. Note if enabled, a small note will be added to all plots to indicate that the PSS®E angle channel has been post-processed by gridmo.
- If
- NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
Example: Output the voltage [p.u] at bus 100, name this output "i_poc_v".
OUTPUT, BUS=100, VAL=V, NAME=i_poc_v
Output line variable
OUTPUT, LINE=, [METERBUS=], VAL=, [PBASE=, QBASE=, SBASE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a variable from a line.
Arguments:
- OUTPUT
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. Values are given at the 'from-side' of the line. - METERBUS (
int)[Optional]: Bus number which is the metering point for theLINE=line. Default value is the 'from' bus number as per theLINE=argument. - VAL (
str): Line value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor [unitless] (positive power factor corresponds to active power travelling towards thetobus from thefrombus). Click here for details on how gridmo calculates power factor.VAL=I: Current [p.u.] on SBASE, where I [p.u.] = S [MVA] / (V [p.u.] * SBASE [MVA]).VAL=ID: Active current [p.u.] on PBASE; where ID [p.u.] = P [MW] / (V [p.u.] * PBASE [MW]).VAL=IQ: Reactive current [p.u.] on QBASE; where IQ [p.u.] = Q [MVAr] / (V [p.u.] * QBASE [MVAr]).
- PBASE 🔢 (
float)[Optional]: MW base used for Id calculation [MW]. Only required ifVAL=ID. - QBASE 🔢 (
float)[Optional]: MVAr base used for Iq calculation [MVAr]. Only required ifVAL=IQ. - SBASE 🔢 (
float)[Optional]: MVA base used for I calculation [MVA]. Only required ifVAL=I. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
Example: Output the active power flowing through the line from bus 100 to bus 200 (measured at the 'from-side' of the line) which has an ID of 1. Name this output "i_poc_p".
OUTPUT, LINE=100->200#1, VAL=P, NAME=i_poc_p
Example: Output the active power flowing through the line from bus 100 to bus 200 (measured at the 'to-side' of the line) which has an ID of 1. Name this output "i_poc_p_farend".
OUTPUT, LINE=100->200#1, METERBUS=200, VAL=P, NAME=i_poc_p_farend
Example: Output the reactive current flowing through the line from bus 100 to bus 200 (measured at the 'from-side' of the line) which has an ID of 1. The QBASE used in the reactive current calculation is 15 MVAr. Name this output i_poc_iq.
OUTPUT, LINE=100->200#1, VAL=IQ, QBASE=15, NAME=i_poc_iq
Output transformer variable
OUTPUT, TX=, [METERBUS=], VAL=, [PBASE=, QBASE=, SBASE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a variable from a transformer.
Arguments:
- OUTPUT
- TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - METERBUS (
int)[Optional]: Bus number which is the metering point for theTX=line. Default value is the 'from' bus number as per theTX=argument. Not supported for three-winding transformers. - VAL (
str): Transformer value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor [unitless] (positive power factor corresponds to active power travelling towards thetobus from thefrombus). Click here for details on how gridmo calculates power factor.VAL=I: Current [p.u.] on SBASE, where I [p.u.] = S [MVA] / (V [p.u.] * SBASE [MVA]).VAL=ID: Active current [p.u.] on PBASE; where ID [p.u.] = P [MW] / (V [p.u.] * PBASE [MW]).VAL=IQ: Reactive current [p.u.] on QBASE; where IQ [p.u.] = Q [MVAr] / (V [p.u.] * QBASE [MVAr]).VAL=TAPRATIOTransformer tap ratio (Only currently supported in PSS®E v34.7+ and v36).
- PBASE 🔢 (
float)[Optional]: MW base used for Id calculation [MW]. Only required ifVAL=ID. - QBASE 🔢 (
float)[Optional]: MVAr base used for Iq calculation [MVAr]. Only required ifVAL=IQ. - SBASE 🔢 (
float)[Optional]: MVA base used for I calculation [MVA]. Only required ifVAL=I. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
The OUTPUT, TX= Command has limited support for three-winding transformers. Specifically, measuring power flow through a three-winding transformer is not recommended as it is ambiguous where the metering is occurring.
Using METERBUS= is not supported for three-winding transformers as it is unclear what direction to assign to 'positive' power flow - for more information see Error 114.
If you need to monitor a three-winding transformer, please consider instead using a 'dummy' line (a line with zero impedance) and monitoring that line.
Example: Output the apparent power flowing through the transformer located between bus 500 to bus 900 which has an ID of 2. Name this output, i_tx_loading.
OUTPUT, TX=500->900#2, VAL=S, NAME=i_tx_loading
Output generator variable
OUTPUT, GEN=, VAL=, [PBASE=, QBASE=, SBASE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a variable from a generator.
Arguments:
- OUTPUT
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - VAL (
str): Generator value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor [unitless] (positive power factor corresponds to reactive power exiting the generator). Click here for details on how gridmo calculates power factor.VAL=I: Current [p.u.] on SBASE; where I [p.u.] = S [MVA] / (V [p.u.] * SBASE [MVA]).VAL=ID: Active current [p.u.] on PBASE; where ID [p.u.] = P [MW] / (V [p.u.] * PBASE [MW]).VAL=IQ: Reactive current [p.u.] on QBASE; where IQ [p.u.] = Q [MVAr] / (V [p.u.] * QBASE [MVAr]).
Additional machine variables
VAL=ANGLE: Rotor angle [degrees].VAL=EFD: Field voltage [p.u.].VAL=PMECH: Mechanical power [p.u. on MBASE].VAL=SPEED: Speed deviation [p.u.].VAL=SPEED_ABS: Absolute speed [p.u.].VAL=XADIFD: Field current [p.u.].VAL=ECOMP: Compensated voltage [p.u.].VAL=VOTHSG: Stabilizer signal [p.u.].VAL=VREF: Regulator reference [p.u.].VAL=VUEL: Minimum excitation limiter signal [p.u.].VAL=VOEL: Maximum excitation limiter signal [p.u.].VAL=GREF: Governor reference [p.u.].VAL=LCREF: Turbine load controller reference [p.u.].VAL=WVLCTY: Wind velocity [m/s].VAL=WTRBSP: Wind turbine speed [p.u.].VAL=WPITCH: Wind pitch [degrees].VAL=WAEROT: Wind aerodynamic torque [p.u.].VAL=WROTRV: Wind rotor voltage [p.u.].VAL=WROTRI: Wind rotor current [p.u.].VAL=WPCMND: Wind active power command from electrical control [p.u.].VAL=WQCMND: Wind reactive power command from electrical control [p.u.].VAL=WAUXSG: Wind auxiliary control output [p.u.].
- PBASE 🔢 (
float)[Optional]: MW base used for Id calculation [MW]. Only required ifVAL=ID. - QBASE 🔢 (
float)[Optional]: MVAr base used for Iq calculation [MVAr]. Only required ifVAL=IQ. - SBASE 🔢 (
float)[Optional]: MVA base used for I calculation [MVA]. Only required ifVAL=I. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name. - PROCESS (
str)[Optional]:- If
VAL=ANGLE:PROCESS=ANGLE_WRAP: Post process the output angle to wrap between -180° to 180°. This can improve benchmarking between PSS®E and other software packages. Default value is no wrapping. Note if enabled, a small note will be added to all plots to indicate that the PSS®E angle channel has been post-processed by gridmo.
- If
Example: Output the reactive power flowing through the generator located at bus 100 which has an ID of 1. Name this output, "i_terminal_q".
OUTPUT, GEN=100#1, VAL=Q, NAME=i_terminal_q
Example: Output the voltage regulator reference point for a synchronous machine located at bus 35402 which has an ID of 1. Name this output, "i_vref".
OUTPUT, GEN=35402#1, VAL=VREF, NAME=i_vref
Output load variable
OUTPUT, LOAD=, VAL=, [PBASE=, QBASE=, SBASE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a variable from a load.
Arguments:
- OUTPUT
- LOAD (
pas): Load/shunt definition. Loads and shunts are defined using the following syntax:bus#id. - VAL (
str): Load value. Options:VAL=P: Active power [MW].VAL=Q: Reactive power [MVAr].VAL=S: Apparent power [MVA].VAL=PF: Power factor [unitless] (positive power factor corresponds to reactive power entering the load). Click here for details on how gridmo calculates power factor.VAL=I: Current [p.u.] on SBASE, where I [p.u.] = S [MVA] / (V [p.u.] * SBASE [MVA]).VAL=ID: Active current [p.u.] on PBASE; where ID [p.u.] = P [MW] / (V [p.u.] * PBASE [MW]).VAL=IQ: Reactive current [p.u.] on QBASE; where IQ [p.u.] = Q [MVAr] / (V [p.u.] * QBASE [MVAr]).
- PBASE 🔢 (
float)[Optional]: MW base used for Id calculation [MW]. Only required ifVAL=ID. - QBASE 🔢 (
float)[Optional]: MVAr base used for Iq calculation [MVAr]. Only required ifVAL=IQ. - SBASE 🔢 (
float)[Optional]: MVA base used for I calculation [MVA]. Only required ifVAL=I. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
The following sign convention is used in the outputs:
- Positive P: Load is consuming active power.
- Negative P: Load is generating active power (e.g. a generator is modelled as a 'negative load').
- Positive Q: Load is consuming reactive power (e.g. a reactive load).
- Negative Q: Load is generating reactive power (e.g. a capacitive load).
- Positive power factor: A load which is consuming reactive power (e.g. a reactive load).
- Negative power factor: A load which is generating reactive power (e.g. a capacitive load).
Example: Output the active power flowing through into the load located at bus 100 which has an ID of 1. Name this output, "i_load_p".
OUTPUT, LOAD=100#1, VAL=P, NAME=i_load_p
Output VAR variable
OUTPUT, GEN/BUS/TX/MINS=, DYRMODEL=, VAR=, [CHANNEL_TYPE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs an Algebraic Variable (VAR) from a generator or bus.
Arguments:
- OUTPUT
- GEN or BUS or TX or MINS:
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - BUS (
int): Bus number. - TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - MINS (
int): Miscellaneous (other) type model global model instance identifier.
- GEN (
- DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - VAR (
str): Algebraic Variable (VAR) ID. Must includeL+. VARs are zero-indexed and apply to the generator itself, not the location of the relevantVARin the PSS®EVARarray. - CHANNEL_TYPE (
str)[Optional]: The type of output channel. Specifying the correct value for the output channel will result in more accurate auto-scaling for connectedPlotNodes. Options:CHANNEL_TYPE=PQS: Active power [MW], reactive power [MVAr] or apparent power [MVA].CHANNEL_TYPE=V: Voltage [p.u.].CHANNEL_TYPE=F: Frequency [Hz].CHANNEL_TYPE=ANGLE: Angle [degrees].CHANNEL_TYPE=I: Current [p.u.], active current [p.u.] or reactive current [p.u.]CHANNEL_TYPE=BINARY: Binary outputs, such as LVRT/HVRT trigger flags.CHANNEL_TYPE=TAPRATIO: Transformer tap ratios [p.u.].CHANNEL_TYPE=PF: Power factor [unitless]. Click here for details on how gridmo calculates power factor.CHANNEL_TYPE=PU: Per unit [p.u.] (e.g. reference signals)
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
Example: Output the reactive power reference of the REPCA1 plant controller at bus 500. Name this output, i_q_ref_val.
OUTPUT, GEN=100#1, DYRMODEL=REPCA1, VAR=L+1, NAME=i_q_ref_val
Output STATE variable
OUTPUT, GEN/BUS/TX/MINS=, DYRMODEL=, STATE=, [CHANNEL_TYPE=, VALSCALE=, VAL_FUNCTION=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Outputs a State Variable (STATE) from a generator or bus.
Parameters:
- OUTPUT
- GEN or BUS or TX or MINS:
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - BUS (
int): Bus number. - TX (
pas): Transformer definition. Transformers are defined using the following syntax:bus1->bus2#id(two-winding transformer) orbus1->bus2->bus3#id(three-winding transformer). - MINS (
int): Miscellaneous (other) type model global model instance identifier.
- GEN (
- DYRMODEL (
str): Model name as specified in the dynamic model data file (.dyr). - STATE (
str): State Variable (STATE) ID. Must includeK+. STATEs are zero-indexed and apply to the generator itself, not the location of the relevantSTATEin the PSS®ESTATEarray. - CHANNEL_TYPE (
str)[Optional]: The type of output channel. Specifying the correct value for the output channel will result in more accurate auto-scaling for connectedPlotNodes. Options:CHANNEL_TYPE=PQS: Active power [MW], reactive power [MVAr] or apparent power [MVA].CHANNEL_TYPE=V: Voltage [p.u.].CHANNEL_TYPE=F: Frequency [Hz].CHANNEL_TYPE=ANGLE: Angle [degrees].CHANNEL_TYPE=I: Current [p.u.], active current [p.u.] or reactive current [p.u.]CHANNEL_TYPE=BINARY: Binary outputs, such as LVRT/HVRT trigger flags.CHANNEL_TYPE=TAPRATIO: Transformer tap ratios [p.u.].CHANNEL_TYPE=PF: Power factor [unitless]. Click here for details on how gridmo calculates power factor.CHANNEL_TYPE=PU: Per unit [p.u.] (e.g. reference signals)
- VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied to the output value (i.e. scaled_output = VAL x VALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied to the output value(s). For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
Example: Output the speed deviation (in per unit) of the GENROE model located at bus 100 with ID 1. Name this output, i_delta_speed.
OUTPUT, GEN=100#1, DYRMODEL=GENROE, STATE=K+4, NAME=i_delta_speed
OUTPUT_FUNCTION Command
OUTPUT_FUNCTION, FUNCTION=, [CHANNEL_TYPE=], NAME=, [PLOT_STYLE=SOLID, DISPLAY_ONLY=NO, LEGEND=]
Use OUTPUT_FUNCTION when you want to create an output that combines other previously defined outputs within the same Node.
See Math operations for more information on the supported functions.
Arguments:
- OUTPUT_FUNCTION
- FUNCTION (
str): User-defined function. - CHANNEL_TYPE (
str)[Optional]: The type of output channel. Specifying the correct value for the output channel will result in more accurate auto-scaling for connectedPlotNodes. Options:CHANNEL_TYPE=PQS: Active power [MW], reactive power [MVAr] or apparent power [MVA].CHANNEL_TYPE=V: Voltage [p.u.].CHANNEL_TYPE=F: Frequency [Hz].CHANNEL_TYPE=ANGLE: Angle [degrees].CHANNEL_TYPE=I: Current [p.u.], active current [p.u.] or reactive current [p.u.]CHANNEL_TYPE=BINARY: Binary outputs, such as LVRT/HVRT trigger flags.CHANNEL_TYPE=TAPRATIO: Transformer tap ratios [p.u.].CHANNEL_TYPE=PF: Power factor [unitless]. Click here for details on how gridmo calculates power factor.CHANNEL_TYPE=PU: Per unit [p.u.] (e.g. reference signals)
- NAME (
str): Output name. Output names must be unique within a Node. - PLOT_STYLE (
str)[Optional]: How this output channel should be plotted on connected Plot Nodes. Defaults toTYPE=SOLID. Options:TYPE=SOLID: A solid line.TYPE=DASHED: A dashed line.
- DISPLAY_ONLY (
bool)[Optional]: IfYES, calculations (such asSETTLING_TIME) will not be performed using this output channel. Default value isNO. - LEGEND (
str)[Optional]: Subplot legend name. Default value is no legend name.
Example: Calculate the sum of the active power from two lines and name the output i_p_line_sum.
OUTPUT, LINE=100->200#1, VAL=P, NAME=i_p_line1
OUTPUT, LINE=300->400#1, VAL=P, NAME=i_p_line2
OUTPUT_FUNCTION, FUNCTION={{i_p_line1}}+{{i_p_line2}}, NAME=i_p_line_sum
Advanced Parameters
The below default values align with the requirements as per Appendix A1 of AEMO's Dynamic Model Acceptance Guidelines (Appendix A1, item 15) released November 2021.
sim.accel
- Description: PSS®E convergence acceleration factor.
- Type:
float - Units: N/A
- Default: 0.2
- Range: > 0
sim.accel=value
sim.tolerance
- Description: PSS®E convergence tolerance factor.
- Type:
float - Units: N/A
- Default: 0.0001
- Range: ≥ 0
sim.tolerance=value
sim.frequency.filter
- Description: PSS®E frequency filter.
- Type:
float - Units: N/A
- Default: 0.008
- Range: ≥ 0
sim.frequency.filter=value
sim.timestep
- Description: Simulation time step.
- Type:
float - Units: [s]
- Default: 0.001 (1 ms)
- Range: > 0
sim.timestep=value
sim.maxiter
- Description: Simulation iterations per time step.
- Type:
int - Units: N/A
- Default: 600
- Range: > 0
sim.maxiter=value
sim.relative.angles
- Description: Defines whether angles should be relative to the generator which was the slack bus prior to starting the dynamic simulation.
- Type:
bool - Units: N/A
- Default: Yes
- Range: Yes, No
sim.relative.angles=value
angles.relative.to.generator
- Description: Defines the generator which angles should be relative to. If not specified, the largest generator on the swing bus will be used.
- Type:
string - Units: N/A
- Default: None
- Range:
bus#gen
angles.relative.to.generator=value
ignore.generators.without.dyre
- Description: If set to
no(default), the dynamic simulation will not launch unless all generators in the case file have a dynamic model specified in the loaded *.dyr files. If set toyes, any machines without dynamic records are ignored and converted to negative loads. - Type:
bool - Units: N/A
- Default: No
- Range: Yes, No
ignore.generators.without.dyre=value
run.chunk.time
run.chunk.time is deprecated in v1.11.0.
- Description: Split large dynamic simulations into individal run commands of this many simulation seconds.
- Type:
int - Units: [s]
- Default: 6
- Range: > 0
run.chunk.time=value
sim.frequency.network.dependence
- Description: Network frequency dependence. If disabled, capacitive and reactive reactance are modelled as fixed values regardless of system frequency.
- Type:
bool - Units: N/A
- Default: No
- Range: Yes, No
Enabling network frequency dependence may cause unexpected behaviour for some SMIB studies. For example, system voltage may vary during a frequency ramp test.
sim.frequency.network.dependence=value
p.load.constant.current
- Description: Defines the percentage of active power (P) load to be converted to a constant current characteristic.
- Type:
float - Units: [p.u.]
- Default: 1
- Range: 0-1
p.load.constant.current=value
q.load.constant.current
- Description: Defines the percentage of reactive power (Q) load to be converted to a constant current characteristic.
- Type:
float - Units: [p.u.]
- Default: 1
- Range: 0-1
q.load.constant.current=value
The balance (remaining proportion) of the p.load.constant.current and 1.load.constant.current are converted to a constant admittance characteristic.
sim.repeat.init.if.suspect
- Description: Repeats dynamic initialisation the specified number of times if PSS®E dynamic initial conditions are suspect.
- Type:
int - Units: unitless
- Default: 0
- Range: ≥ 0
sim.repeat.init.if.suspect=value
aus.nem.conl
- Description: Attempts to apply Australian NEM specific load constant current/constant admittance parameters based on specific loads in the loaded case. Only applicable to Australian NEM network studies.
- Type:
bool - Units: N/A
- Default: No
- Range: Yes, No
aus.nem.conl=value
plb.model.via.direct.dyr.changes
- Description:
- If
YES, uses an alternative method to add a playback generator model to the.dyrfile (via directly modifying the copy of the source.dyrfile after it is copied to the working directory). - If
NO, uses PSS®E's API to remove the existing generator and add a new playback generator in a second.dyrfile. - Default
NOworks for most OEM models, though we are aware of some cases where frequency playback does not work unless this is set toYES.
- If
- Type:
bool - Units: N/A
- Default: No
- Range: Yes, No
plb.model.via.direct.dyr.changes=value
legacy.invalid.number.support
If set to Yes, sets additional PSS®E settings to reduce PSS®E crashes if PSS®E encounters an invalid number (e.g. NaN value). However, we're aware that this can cause some user-defined models to crash if they don't also support these invalid numbers.
Prior to gridmo Engine v1.7.0, this was enabled by default, but is now disabled by default.
- Type:
bool - Units: N/A
- Default: No
- Range: Yes / No
legacy.invalid.number.support=value
Deprecated Commands
TOVTEST Command
TOVTEST Command is no longer recommended for new Projects. Instead, use the VDISTURBANCE Command.
TOVTEST, BUS=, AT=, QCAP=, DURATION=, [TARGET=, LINE=]
Completes a Transient Over-Voltage (TOV) test whereby a fixed shunt (capacitor) is switched in service on BUS= bus of QCAP= MVAr, AT= seconds into the dynamic simulation. The capacitor is removed after DURATION= milliseconds.
Arguments:
- TOVTEST
- BUS (
int): Bus number to which the capacitor is applied. This is typically the connection point bus in SMIB studies. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - QCAP 🔢 (
float): Options:QCAP=X(whereXis a number): Size of the capacitor to switch in [MVAr].QCAP=CALC: Enables the automatic calculation of the capacitor size to achieve a target overvoltage based on theTARGET=Argument. Any contribution from the generator under test is not included in this calculation.
- DURATION 🔢 (
float): Disturbance duration [ms]. When the duration has expired, the capacitor is removed. - TARGET 🔢 (
float)[Optional]: Only required ifQCAP=CALC[p.u.]. - LINE 🔢 (
float)[Optional]: Line definition of the Thévenin equivalent impedance. Only required ifQCAP=CALC. Lines are defined using the following syntax: from->to#id.
Only one TOVTEST Command is supported in a single PSS®E Dynamic Node.
Example: At 10 seconds, switch in a capacitor of 15 MVAr at bus 500 which, based on the SCR and X/R, gives a TOV of 1.15pu. Switch the capacitor out again after 0.9 seconds.
TOVTEST, BUS=500, AT=10, QCAP=15, DURATION=900
Example:
At 5 seconds switch in a capacitor large enough to achieve a 1.2 pu over-voltage at the connection point bus 500, using the line 500->999#1 as the source impedance to calculate the correct capacitor size. Switch the capacitor out again after 0.5 seconds.
TOVTEST, BUS=500, AT=5, QCAP=CALC, DURATION=500, TARGET=1.2, LINE=500->999#1
ADVFAULT Command
ADVFAULT Command is no longer recommended for new Projects. Instead, use the BUS_FAULT and/or LINE_FAULT Commands.
ADVFAULT, LINE=, AT=, DURATION1=, DURATION2=, DISTANCE%=, TYPE=, [FZ=0, XR=0, AR_RETRIES=0, AR_DEADTIME=, AR_FINALSTATE=]
Applies a power system fault on a line at a specified distance with configurable auto-reclosing and final state.
Arguments:
- ADVFAULT
- LINE (
pas): Line definition. Lines are defined using the following syntax:from->to#id. - AT 🔢 (
float): Time at which the fault is applied during the dynamic simulation [s]. - DURATION1 (
float): Fault duration [ms]. When the duration has expired, the line segment connecting thefrombus to the fault will be disconnected. - DURATION2 (
float): Fault duration [ms]. When the duration has expired, the line segment connecting thetobus to the fault will be disconnected. - DISTANCE% 🔢 (
float): The distance of the fault from thefrombus to thetobus [%] (i.e.10%specifies a fault located close to thefrombus). - TYPE (
str): Fault type. Options:TYPE=3PH: Three phase fault.TYPE=2PHG: Two phase to ground fault.TYPE=PHPH: Phase to phase fault.TYPE=PHG: Phase to ground fault.
- FZ 🔢 (
float)[Optional]: Fault impedance [Ω]. Default value is 0 Ω (i.e. bolted fault). - XR 🔢 (
float)[Optional]: Reactance to resistance ratio of the fault. Default value is 0 (pure resistive fault). - AR_RETRIES (
int)[Optional]: Number of auto-reclose attempts. Default value is 0. IfAR_RETRIES > 0then the following additional parameters must be provided:- AR_DEADTIME (
float): Dead time for line reclosure [ms]. Each end of the line has an independent auto-reclose timer (i.e.DURATION1andDURATION2), but they must have the same dead time. - AR_INDEPENDENT_TIMERS (
bool)[Optional]: Are the auto-reclose timers at each end of the line independent? Options:- [Default] If
AR_INDEPENDENT_TIMERS=YESthen the auto-reclose timers at each end of the line are independent. This is common for most real-world auto-reclose schemes. - If
AR_INDEPENDENT_TIMERS=NOthen the auto-reclose timers at each end of the line are time-synchronized. Both ends will attempt to auto-reclose at the same time once the dead-time has passed after the slowest clearing end has cleared. Note this arrangement is fictitious and relatively uncommon in real-world applications.
- [Default] If
- AR_FINALSTATE (
str): Final state for the line after the fault andAR_RETRIESauto-reclose attempts. Options:AR_FINALSTATE=IN: After the fault and (at least one) auto-reclose attempt(s), the line is back in service.AR_FINALSTATE=OUT: After the fault and (at least one) auto-reclose attempt(s), the line is out of service.
- AR_CLOSE_ONE_END(
int,str)[Optional] Single sided auto-reclose logic. Options:- [Default] If
AR_CLOSE_ONE_END=frombuswherefrombusis in the line definition (frombus->tobus#id), only this end of the line will attempt auto-reclose. The other end of the line is assumed to have dead-line blocking which prevents it from reclosing. - If
AR_CLOSE_ONE_END=tobuswheretobusis in the line definition (tobus->tobus#id), only this end of the line will attempt auto-reclose. The other end of the line is assumed to have dead-line blocking which prevents it from reclosing. - If
AR_CLOSE_ONE_END=NOthen both ends of the line will attempt to auto-reclose independently - this is equivalent to there being no dead-line blocking of the auto-reclose logic on this line.
- [Default] If
- AR_DEADTIME (
The AR_RETRIES argument specifies the total number of retry events, and the AR_FINALSTATE specifies if the final reclose was successful. For example:
- If
AR_RETRIES=1andAR_FINALSTATE=OUT, the line will attempt to reclose once, the fault will still be present and the line will lock out. - If
AR_RETRIES=1andAR_FINALSTATE=IN, the line will attempt to reclose once, the fault will not be present and the line will return to service. - If
AR_RETRIES=2andAR_FINALSTATE=IN, the line will attempt to reclose once, fail (fault still present), then reclose again. This second reclose will be successful, the fault will no longer be present and the line will return to service. :::
- If
AR_FINALSTATE=IN, the line will be returned to service and the buses at both ends of the line will be reconnected, even if the bus was disconnected automatically by PSS®E due to being islanded. - If
AR_FINALSTATE=OUT, the line will stay out of service. The buses at both ends of the line will remain in service unless they were disconnected automatically by PSS®E due to being islanded. :::
PSS®E only natively supports three phase (3PH) faults. Three phase to ground (3PHG) are not natively supported.
AR_RETRIES, AR_DEADTIME and AR_FINALSTATE arguments must be used together. If AR_RETRIES > 0, then AR_DEADTIME and AR_FINALSTATE are required.
Example:
- At 5 seconds, apply a three phase fault on the line from bus 500 to bus 800 with an ID of 1.
- The fault is very close to bus 500 (10% of line impedance from bus 500).
- The fault is a bolted fault and was cleared on both ends in 80 ms and the line is now out of service.
- No auto-reclose is enabled.
Note FZ=0, XR=0, AR_RETRIES=0, AR_FINALSTATE=OUT have been omitted, as these are the default values.
ADVFAULT, AT=5, LINE=500->800#1, TYPE=3PH, DURATION1=80, DURATION2=80, DISTANCE%=10
Example:
- At 10 seconds, a phase to phase fault occurs between substation 300 and substation 400. Only one line (ID 1) connects the two substations. The fault occurs 92% down the line (i.e. is very close to bus 400).
- The fault has an impedance of 3+9j [Ω].
- Bus 300 clears the fault on its end in zone 2 distance protection in 220 [ms] (the line from bus 300 to the fault is tripped, no acceleration method is installed).
- Bus 400 clears the fault on its end in zone 1 distance protection in 67 [ms] (the line from bus 400 to the fault is tripped).
- Bus 300 recloses after a 5 second delay (at 15.220 [s]). The fault is still present. The line from bus 300 to the fault re-trips after 220 [ms].
- Bus 400 recloses after a 5 second delay (i.e. at 15.067 [s]). The fault is still present. The line from bus 400 to the fault re-trips after 67 [ms].
- The line is locked out after the reclose attempt and remains out of service.
ADVFAULT, AT=10, LINE=300->400#1, TYPE=PHPH, DURATION1=220, DURATION2=67, DISTANCE%=92, FZ=9.487, XR=3, AR_RETRIES=1, AR_DEADTIME=5000, AR_FINALSTATE=OUT
Control VREF
CONTROL, GEN=, [GEN=], [VALSCALE=, VAL_FUNCTION=], AT=, VREF=
This command is no longer recommended for new Projects as it has been replaced with the CONTROL_VREF command.
Controls one generator (or generator controller) by changing the voltage reference.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toVREF(i.e.VREFxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toVREF. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - VREF: Generator voltage reference. There are two methods for specifying the voltage reference:
- Absolute voltage 🔢 (
float): Absolute voltage [p.u.] (e.g.1.07); or - Relative voltage (
str): Relative voltage [pu] (e.g.+0.05 pu). The change is relative to the value at the start of the dynamic simulation (e.g. A+0.05 puchange followed by a-0.05 puchange will return VREF to its starting value).
- Absolute voltage 🔢 (
Example: At 5 seconds, change the voltage reference of the generator model at bus 500 with an ID of 2. Change VREF (voltage reference) to 1.01 [p.u.].
CONTROL, GEN=500#2, AT=5, VREF=1.01
Example: At 5 seconds, change the voltage reference of the generator model at bus 500 with an ID of 2. Change VREF (voltage reference) by 0.04 per unit [pu] relative to the original VREF value before the start of the dynamic simulation.
CONTROL, GEN=500#2, AT=5, VREF=0.04 pu
Control GREF
CONTROL, GEN=, [GEN=], [VALSCALE=, VAL_FUNCTION=], AT=, GREF=
This command is no longer recommended for new Projects as it has been replaced with the CONTROL_GREF command.
Controls one generator (or generator controller) by changing the governor (speed) reference.
Arguments:
- CONTROL
- GEN (
pas): Generator definition. Generators are defined using the following syntax:bus#id. - GEN (
pas)[Optional]: Additional generator definitions. Generators are defined using the following syntax:bus#id. - VALSCALE 🔢 (
float)[Optional]: Multiplicative scaling factor applied toGREF(i.e.GREFxVALSCALE). Default value is 1. - VAL_FUNCTION 🔢 (
str)[Optional]: Function applied toGREF. For example,VAL_FUNCTION=2*VAL+1. Cannot be used in conjunction withVALSCALE. Click here for more information on VAL_FUNCTION syntax and supported functions. - AT 🔢 (
float): Time at which the Command is applied during the dynamic simulation [s]. - GREF: Generator governor reference. There are two methods for specifying the reference:
- Absolute speed deviation (
float): Absolute speed deviation value [p.u. ] (e.g.0.045); or - Relative speed deviation (
str): Relative speed deviation [pu] (e.g.+0.05 pu). The change is relative to the value at the start of the dynamic simulation (e.g. A+0.05 puchange followed by a-0.05 puchange will return GREF to its starting value).
- Absolute speed deviation (
Example: At 5 seconds, change the governor reference of the generator model at bus 500 with an ID of 2. Change GREF (governor speed deviation) to 0.02 [p.u.].
CONTROL, GEN=500#2, AT=5, GREF=0.02
Example: At 5 seconds, change the governor reference of the GENROE generator model at bus 500 with an ID of 2. Change GREF (governor speed deviation) by +0.02 [pu] relative to the original GREF value before the start of the dynamic simulation.
CONTROL, GEN=500#2, AT=5, GREF=0.02 pu